 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Networked Multi-Agent System for Mobile Wireless Infrastructure on Demand
Jun 14, 2023



Despite the prevalence of wireless connectivity in urban areas around the globe, there remain numerous and diverse situations where connectivity is insufficient or unavailable. To address this, we introduce mobile wireless infrastructure on demand, a system of UAVs that can be rapidly deployed to establish an ad-hoc wireless network. This network has the capability of reconfiguring itself dynamically to satisfy and maintain the required quality of communication. The system optimizes the positions of the UAVs and the routing of data flows throughout the network to achieve this quality of service (QoS). By these means, task agents using the network simply request a desired QoS, and the system adapts accordingly while allowing them to move freely. We have validated this system both in simulation and in real-world experiments. The results demonstrate that our system effectively offers mobile wireless infrastructure on demand, extending the operational range of task agents and supporting complex mobility patterns, all while ensuring connectivity and being resilient to agent failures.
Learning Connectivity-Maximizing Network Configurations
Dec 14, 2021


In this work we propose a data-driven approach to optimizing the algebraic connectivity of a team of robots. While a considerable amount of research has been devoted to this problem, we lack a method that scales in a manner suitable for online applications for more than a handful of agents. To that end, we propose a supervised learning approach with a convolutional neural network (CNN) that learns to place communication agents from an expert that uses an optimization-based strategy. We demonstrate the performance of our CNN on canonical line and ring topologies, 105k randomly generated test cases, and larger teams not seen during training. We also show how our system can be applied to dynamic robot teams through a Unity-based simulation. After training, our system produces connected configurations 2 orders of magnitude faster than the optimization-based scheme for teams of 10-20 agents.
Learning Connectivity for Data Distribution in Robot Teams
Mar 08, 2021
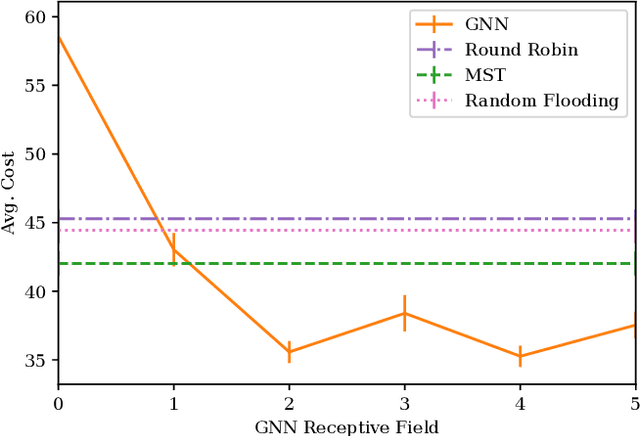
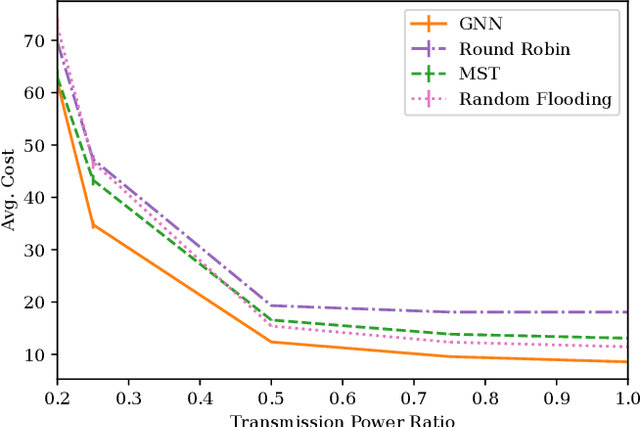
Many algorithms for control of multi-robot teams operate under the assumption that low-latency, global state information necessary to coordinate agent actions can readily be disseminated among the team. However, in harsh environments with no existing communication infrastructure, robots must form ad-hoc networks, forcing the team to operate in a distributed fashion. To overcome this challenge, we propose a task-agnostic, decentralized, low-latency method for data distribution in ad-hoc networks using Graph Neural Networks (GNN). Our approach enables multi-agent algorithms based on global state information to function by ensuring it is available at each robot. To do this, agents glean information about the topology of the network from packet transmissions and feed it to a GNN running locally which instructs the agent when and where to transmit the latest state information. We train the distributed GNN communication policies via reinforcement learning using the average Age of Information as the reward function and show that it improves training stability compared to task-specific reward functions. Our approach performs favorably compared to industry-standard methods for data distribution such as random flooding and round robin. We also show that the trained policies generalize to larger teams of both static and mobile agents.
ROS-NetSim: A Framework for the Integration of Robotic and Network Simulators
Jan 25, 2021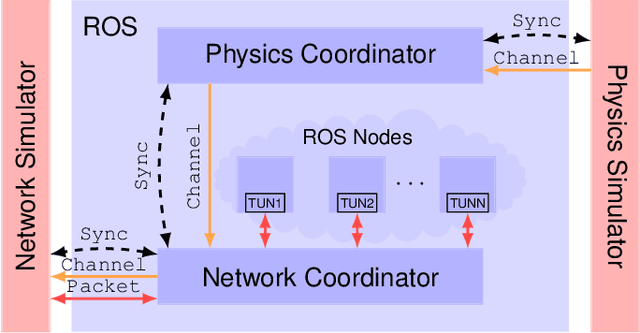
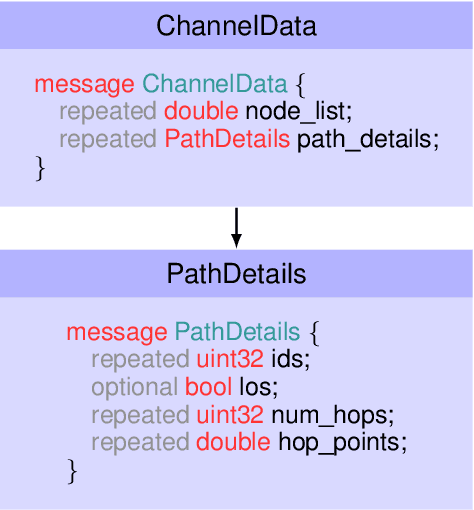
Multi-agent systems play an important role in modern robotics. Due to the nature of these systems, coordination among agents via communication is frequently necessary. Indeed, Perception-Action-Communication (PAC) loops, or Perception-Action loops closed over a communication channel, are a critical component of multi-robot systems. However, we lack appropriate tools for simulating PAC loops. To that end, in this paper, we introduce ROS-NetSim, a ROS package that acts as an interface between robotic and network simulators. With ROS-NetSim, we can attain high-fidelity representations of both robotic and network interactions by accurately simulating the PAC loop. Our proposed approach is lightweight, modular and adaptive. Furthermore, it can be used with many available network and physics simulators by making use of our proposed interface. In summary, ROS-NetSim is (i) Transparent to the ROS target application, (ii) Agnostic to the specific network and physics simulator being used, and (iii) Tunable in fidelity and complexity. As part of our contribution, we have made available an open-source implementation of ROS-NetSim to the community.
Mobile Wireless Network Infrastructure on Demand
Feb 07, 2020
In this work, we introduce Mobile Wireless Infrastructure on Demand: a framework for providing wireless connectivity to multi-robot teams via autonomously reconfiguring ad-hoc networks. In many cases, previous multi-agent systems either presumed on the availability of existing communication infrastructure or were required to create a network in addition to completing their objective. Instead our system explicitly assumes the responsibility of creating and sustaining a wireless network capable of satisfying the end-to-end communication requirements of a task team performing an arbitrary objective. To accomplish this goal, we propose a joint optimization framework that alternates between finding optimal network routes to support data flows between the task agents and updating the configuration of the network team to improve performance. We demonstrate our approach in a set of simulations in which a fleet of UAVs provide connectivity to a set of task agents patrolling a perimeter.