 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Off-Road Navigation via a Learned Speed Distribution Map
Mar 25, 2022
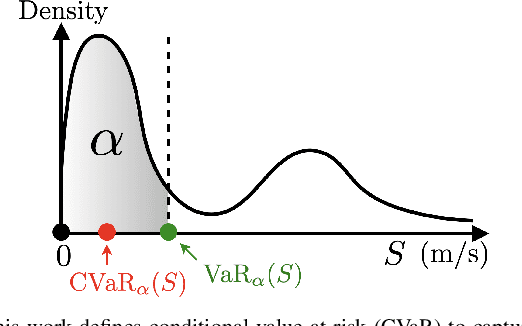
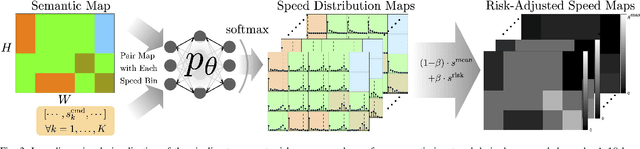
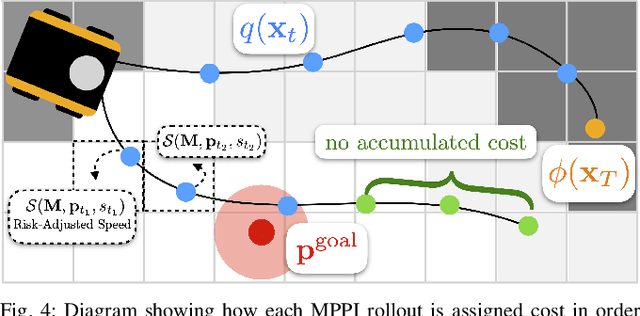
Motion planning in off-road environments requires reasoning about both the geometry and semantics of the scene (e.g., a robot may be able to drive through soft bushes but not a fallen log). In many recent works, the world is classified into a finite number of semantic categories that often are not sufficient to capture the ability (i.e., the speed) with which a robot can traverse off-road terrain. Instead, this work proposes a new representation of traversability based exclusively on robot speed that can be learned from data, offers interpretability and intuitive tuning, and can be easily integrated with a variety of planning paradigms in the form of a costmap. Specifically, given a dataset of experienced trajectories, the proposed algorithm learns to predict a distribution of speeds the robot could achieve, conditioned on the environment semantics and commanded speed. The learned speed distribution map is converted into costmaps with a risk-aware cost term based on conditional value at risk (CVaR). Numerical simulations demonstrate that the proposed risk-aware planning algorithm leads to faster average time-to-goals compared to a method that only considers expected behavior, and the planner can be tuned for slightly slower, but less variable behavior. Furthermore, the approach is integrated into a full autonomy stack and demonstrated in a high-fidelity Unity environment and is shown to provide a 30\% improvement in the success rate of navigation.
ROS-NetSim: A Framework for the Integration of Robotic and Network Simulators
Jan 25, 2021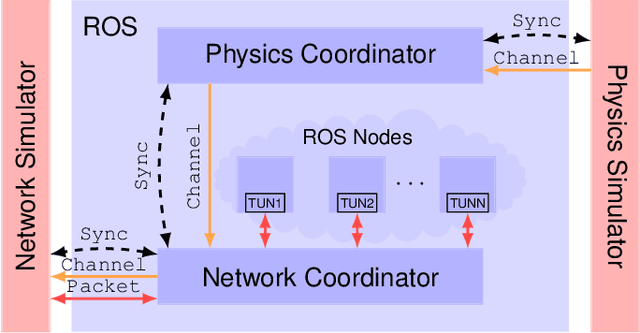
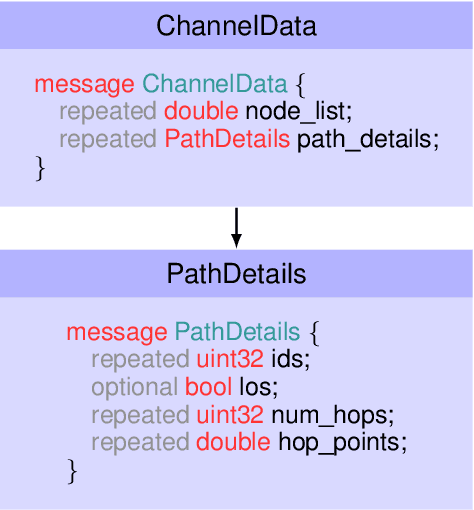
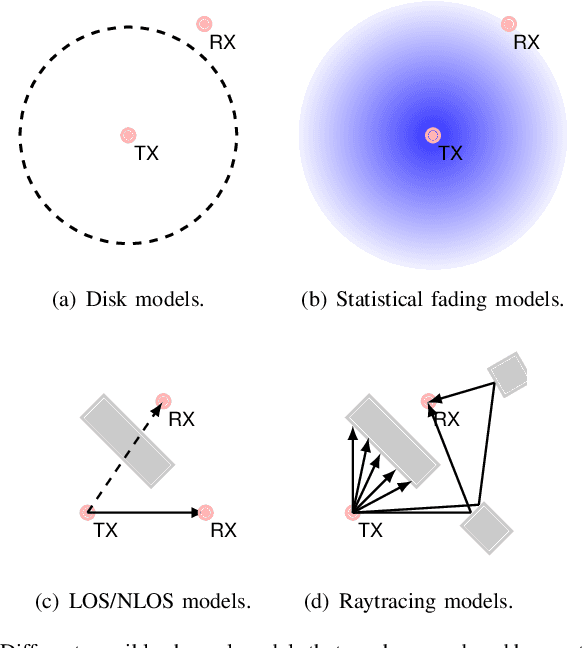
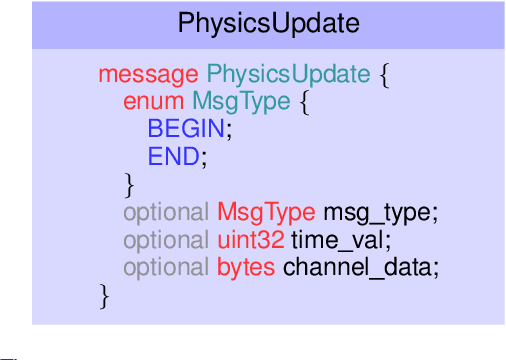
Multi-agent systems play an important role in modern robotics. Due to the nature of these systems, coordination among agents via communication is frequently necessary. Indeed, Perception-Action-Communication (PAC) loops, or Perception-Action loops closed over a communication channel, are a critical component of multi-robot systems. However, we lack appropriate tools for simulating PAC loops. To that end, in this paper, we introduce ROS-NetSim, a ROS package that acts as an interface between robotic and network simulators. With ROS-NetSim, we can attain high-fidelity representations of both robotic and network interactions by accurately simulating the PAC loop. Our proposed approach is lightweight, modular and adaptive. Furthermore, it can be used with many available network and physics simulators by making use of our proposed interface. In summary, ROS-NetSim is (i) Transparent to the ROS target application, (ii) Agnostic to the specific network and physics simulator being used, and (iii) Tunable in fidelity and complexity. As part of our contribution, we have made available an open-source implementation of ROS-NetSim to the community.
APPLD: Adaptive Planner Parameter Learning from Demonstration
Mar 31, 2020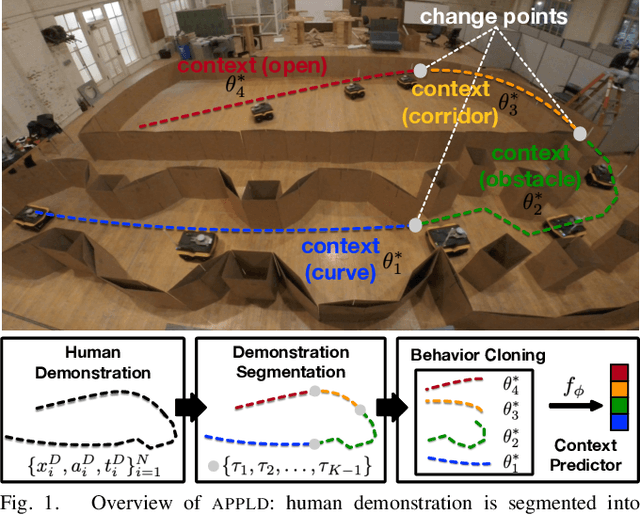
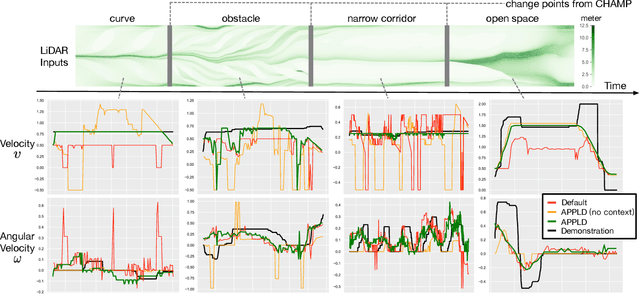
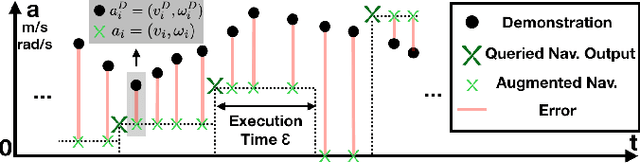
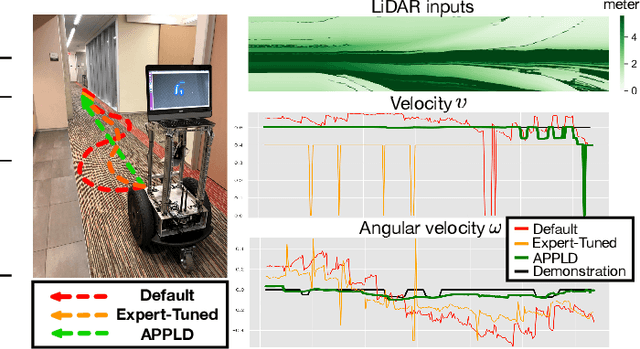
Existing autonomous robot navigation systems allow robots to move from one point to another in a collision-free manner. However, when facing new environments, these systems generally require re-tuning by expert roboticists with a good understanding of the inner workings of the navigation system. In contrast, even users who are unversed in the details of robot navigation algorithms can generate desirable navigation behavior in new environments via teleoperation. In this paper, we introduce APPLD, Adaptive Planner Parameter Learning from Demonstration, that allows existing navigation systems to be successfully applied to new complex environments, given only a human teleoperated demonstration of desirable navigation. APPLD is verified on two robots running different navigation systems in different environments. Experimental results show that APPLD can outperform navigation systems with the default and expert-tuned parameters, and even the human demonstrator themselves.
Mobile Wireless Network Infrastructure on Demand
Feb 07, 2020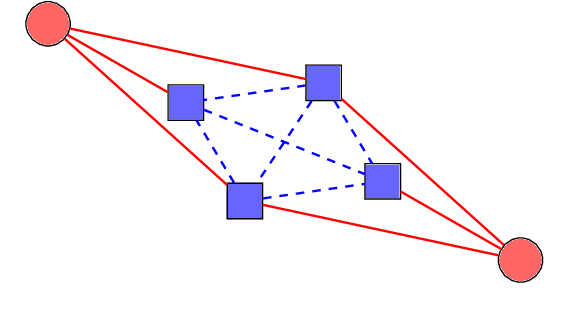
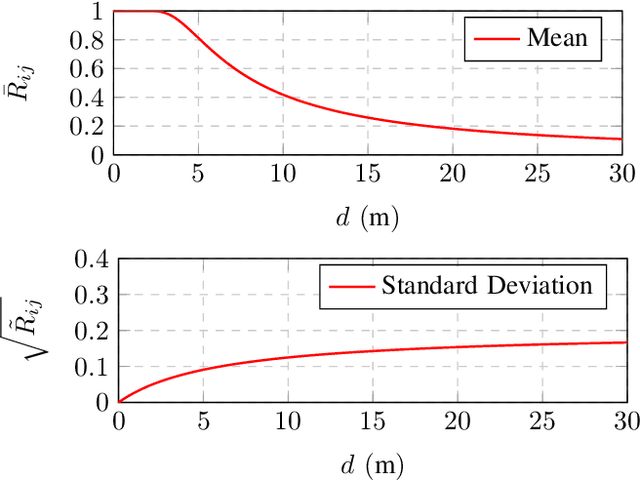
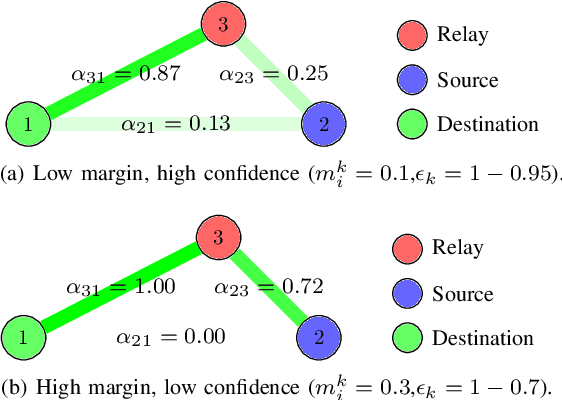
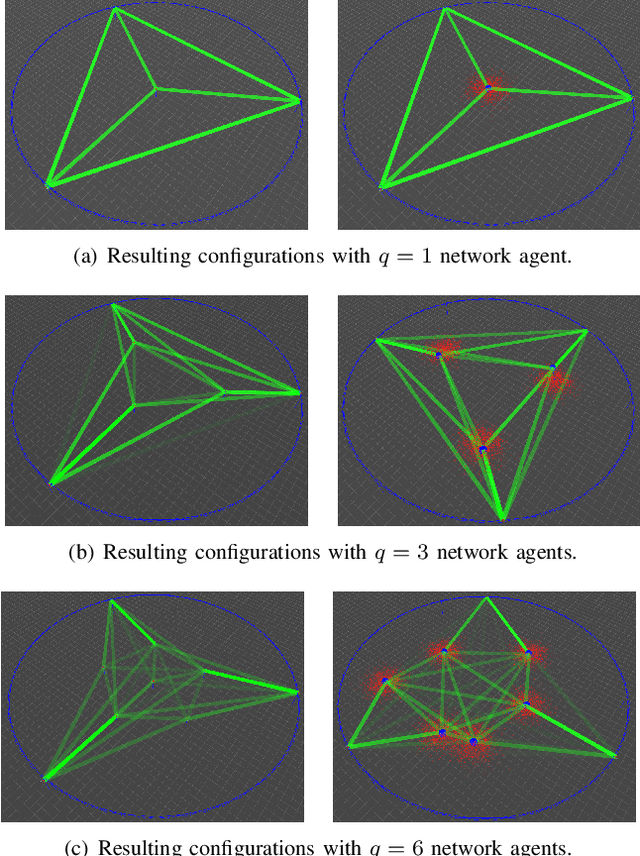
In this work, we introduce Mobile Wireless Infrastructure on Demand: a framework for providing wireless connectivity to multi-robot teams via autonomously reconfiguring ad-hoc networks. In many cases, previous multi-agent systems either presumed on the availability of existing communication infrastructure or were required to create a network in addition to completing their objective. Instead our system explicitly assumes the responsibility of creating and sustaining a wireless network capable of satisfying the end-to-end communication requirements of a task team performing an arbitrary objective. To accomplish this goal, we propose a joint optimization framework that alternates between finding optimal network routes to support data flows between the task agents and updating the configuration of the network team to improve performance. We demonstrate our approach in a set of simulations in which a fleet of UAVs provide connectivity to a set of task agents patrolling a perimeter.