 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser-Driven Functional Movement Training with a Wearable Hand Robot after Stroke
Nov 18, 2019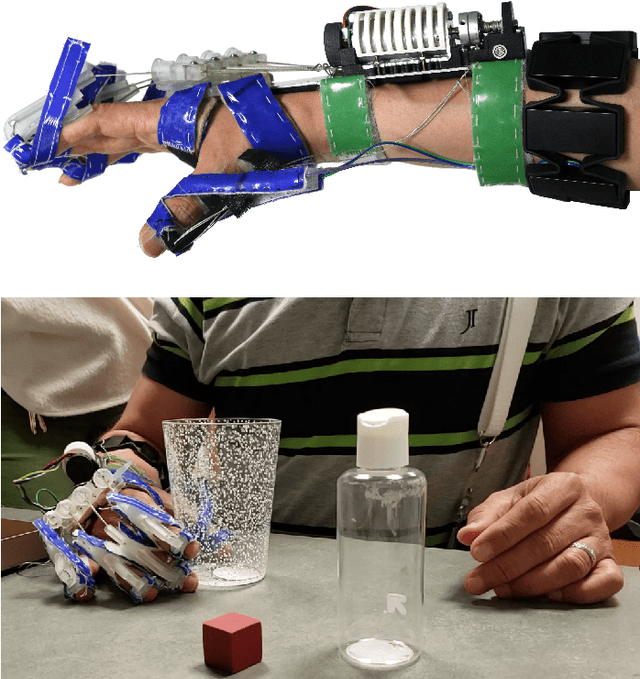

We studied the performance of a robotic orthosis designed to assist the paretic hand after stroke. This orthosis is designed to be wearable and fully user-controlled, allowing it to serve two possible roles: as a rehabilitation device, designed to be integrated in device-mediated rehabilitation exercises to improve performance of the affected upper limb without device assistance; or as an assistive device, designed to be integrated into daily wear to improve performance of the affected limb with grasping tasks. We present the clinical outcomes of a study designed as a feasibility test for these hypotheses. 11 participants with chronic stroke engaged in a month-long training protocol using the orthosis. Individuals were evaluated using standard outcome measures, both with and without orthosis assistance. Fugl-Meyer scores (unassisted) showed improvement focused specifically at the distal joints of the upper limb, and Action Research Arm Test (ARAT) scores (unassisted) also showed a positive trend. These results suggest the possibility of using our orthosis as a rehabilitative device for the hand. Assisted ARAT and Box and Block Test scores showed that the device can function in an assistive role for participants with minimal functional use of their hand at baseline. We believe these results highlight the potential for wearable and user-driven robotic hand orthoses to extend the use and training of the affected upper limb after stroke.
Multimodal Sensing and Interaction for a Robotic Hand Orthosis
Dec 18, 2018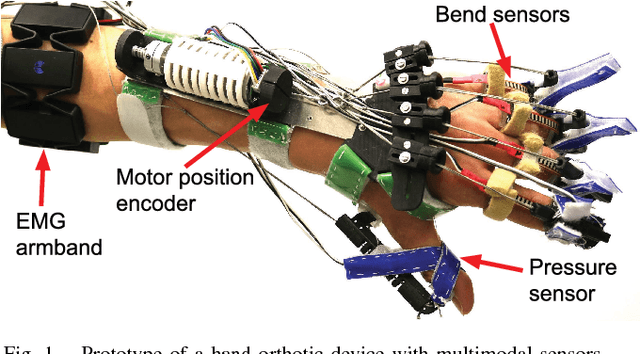
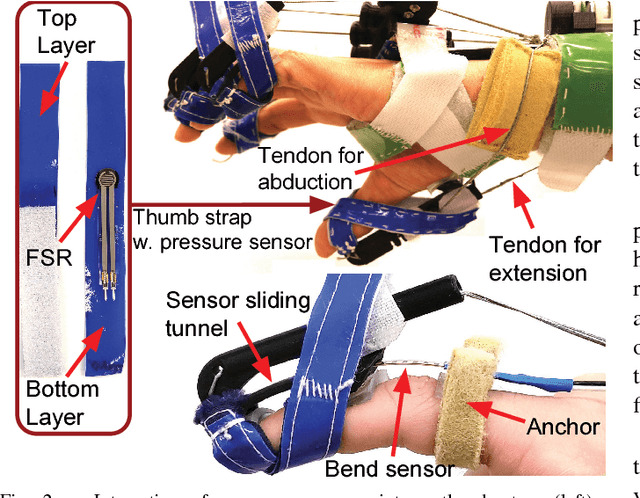
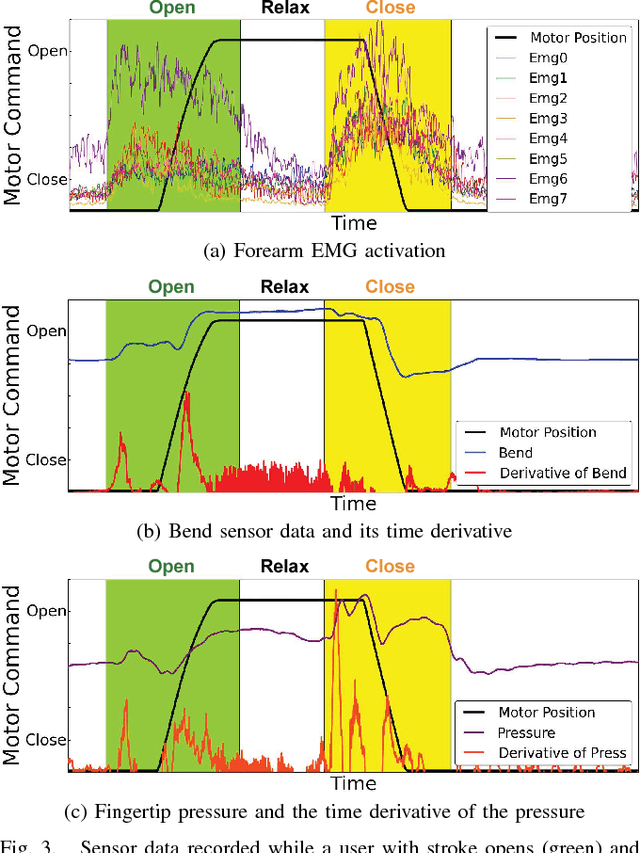
Wearable robotic hand rehabilitation devices can allow greater freedom and flexibility than their workstation-like counterparts. However, the field is generally lacking effective methods by which the user can operate the device: such controls must be effective, intuitive, and robust to the wide range of possible impairment patterns. Even when focusing on a specific condition, such as stroke, the variety of encountered upper limb impairment patterns means that a single sensing modality, such as electromyography (EMG), might not be sufficient to enable controls for a broad range of users. To address this significant gap, we introduce a multimodal sensing and interaction paradigm for an active hand orthosis. In our proof-of-concept implementation, EMG is complemented by other sensing modalities, such as finger bend and contact pressure sensors. We propose multimodal interaction methods that utilize this sensory data as input, and show they can enable tasks for stroke survivors who exhibit different impairment patterns. We believe that robotic hand orthoses developed as multimodal sensory platforms with help address some of the key challenges in physical interaction with the user.
* 8 pages. 9 Figures. IEEE Robotics and Automation Letters. Preprint version. Accepted Dec, 2018
Design and Development of Effective Transmission Mechanisms on a Tendon Driven Hand Orthosis for Stroke Patients
Jul 31, 2018

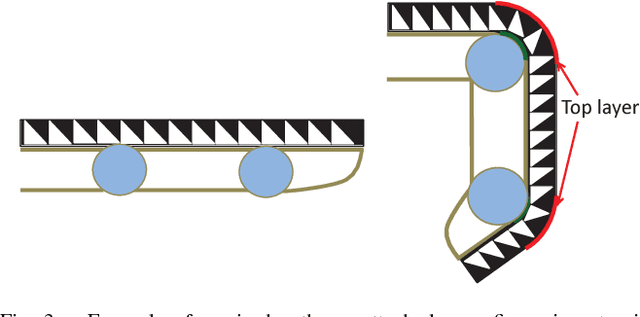
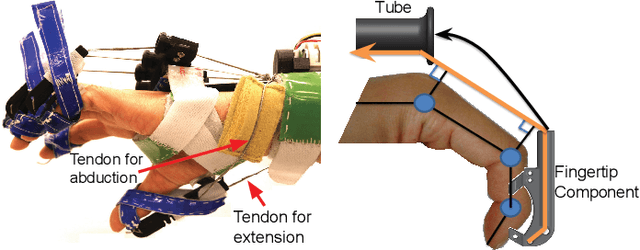
Tendon-driven hand orthoses have advantages over exoskeletons with respect to wearability and safety because of their low-profile design and ability to fit a range of patients without requiring custom joint alignment. However, no existing study on a wearable tendon-driven hand orthosis for stroke patients presents evidence that such devices can overcome spasticity given repeated use and fatigue, or discusses transmission efficiency. In this study, we propose two designs that provide effective force transmission by increasing moment arms around finger joints. We evaluate the designs with geometric models and experiment using a 3D-printed artificial finger to find force and joint angle characteristics of the suggested structures. We also perform clinical tests with stroke patients to demonstrate the feasibility of the designs. The testing supports the hypothesis that the proposed designs efficiently elicit extension of the digits in patients with spasticity as compared to existing baselines.
EMG Pattern Classification to Control a Hand Orthosis for Functional Grasp Assistance after Stroke
Feb 01, 2018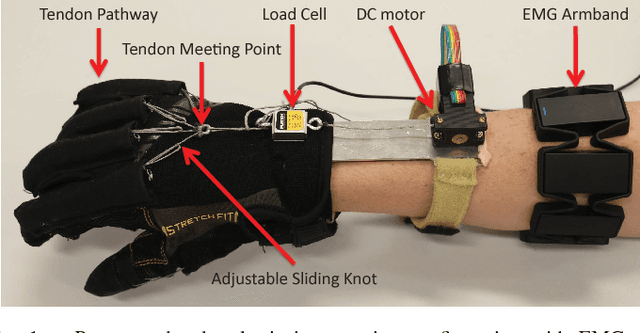
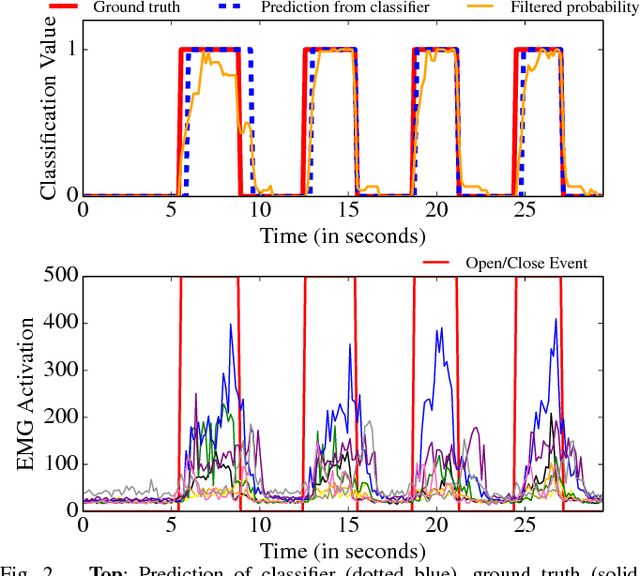
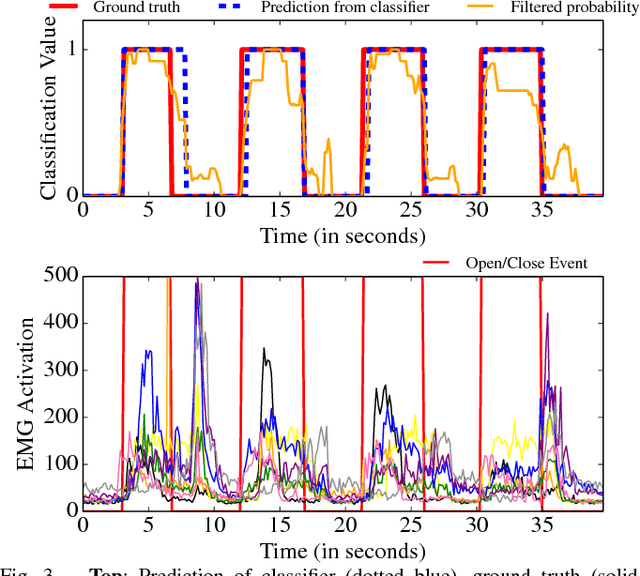
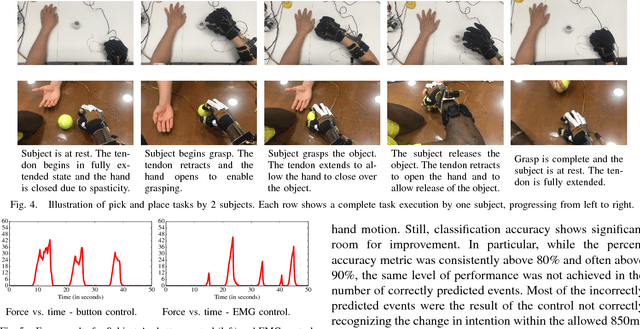
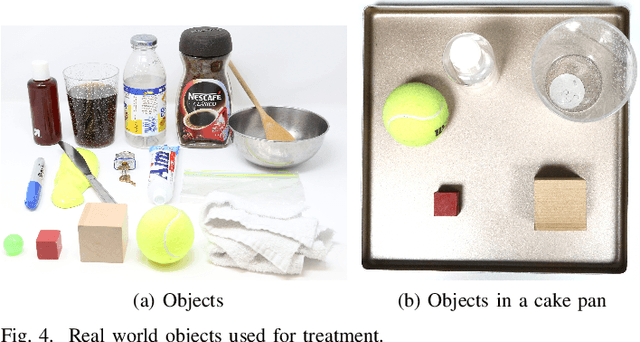
Wearable orthoses can function both as assistive devices, which allow the user to live independently, and as rehabilitation devices, which allow the user to regain use of an impaired limb. To be fully wearable, such devices must have intuitive controls, and to improve quality of life, the device should enable the user to perform Activities of Daily Living. In this context, we explore the feasibility of using electromyography (EMG) signals to control a wearable exotendon device to enable pick and place tasks. We use an easy to don, commodity forearm EMG band with 8 sensors to create an EMG pattern classification control for an exotendon device. With this control, we are able to detect a user's intent to open, and can thus enable extension and pick and place tasks. In experiments with stroke survivors, we explore the accuracy of this control in both non-functional and functional tasks. Our results support the feasibility of developing wearable devices with intuitive controls which provide a functional context for rehabilitation.
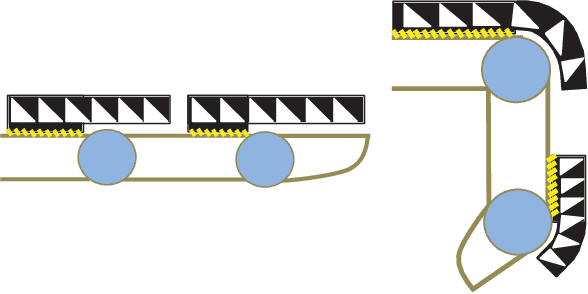
On the Feasibility of Wearable Exotendon Networks for Whole-Hand Movement Patterns in Stroke Patients
Dec 19, 2017
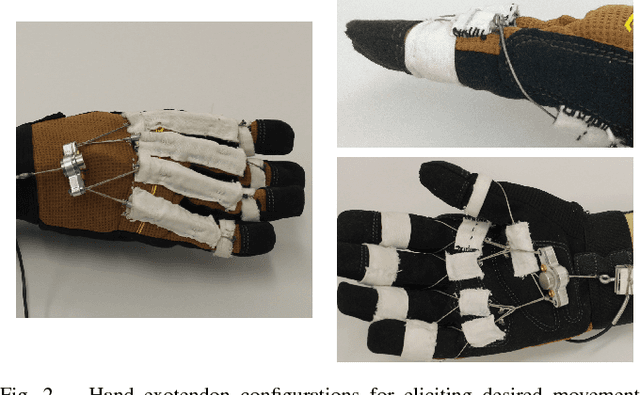
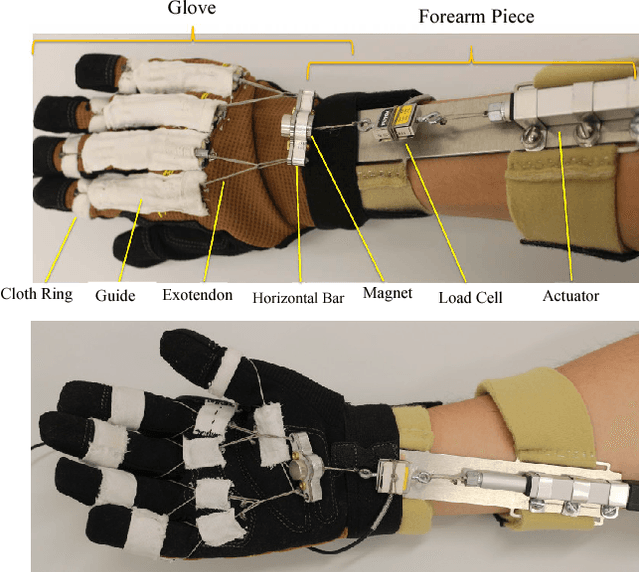
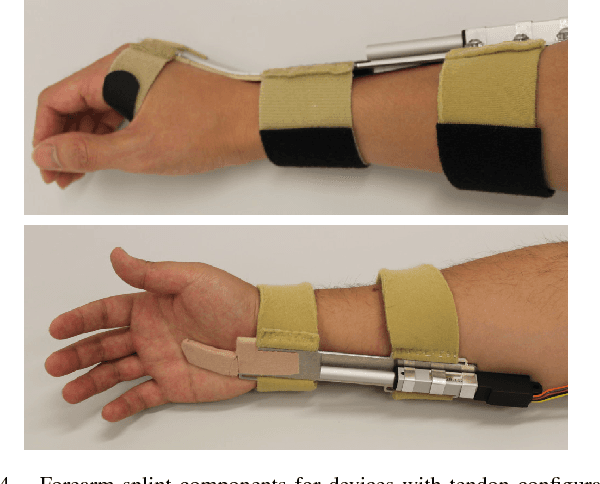
Fully wearable hand rehabilitation and assistive devices could extend training and improve quality of life for patients affected by hand impairments. However, such devices must deliver meaningful manipulation capabilities in a small and lightweight package. In this context, this paper investigates the capability of single-actuator devices to assist whole-hand movement patterns through a network of exotendons. Our prototypes combine a single linear actuator (mounted on a forearm splint) with a network of exotendons (routed on the surface of a soft glove). We investigated two possible tendon network configurations: one that produces full finger extension (overcoming flexor spasticity), and one that combines proximal flexion with distal extension at each finger. In experiments with stroke survivors, we measured the force levels needed to overcome various levels of spasticity and open the hand for grasping using the first of these configurations, and qualitatively demonstrated the ability to execute fingertip grasps using the second. Our results support the feasibility of developing future wearable devices able to assist a range of manipulation tasks.