 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-Supervised Intent Inferral Using Ipsilateral Biosignals on a Hand Orthosis for Stroke Subjects
Oct 30, 2020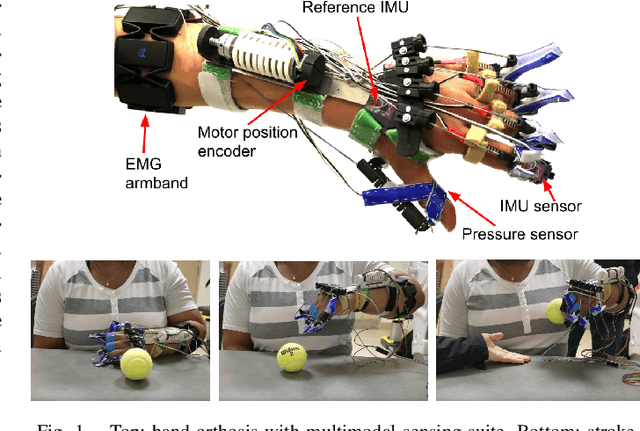

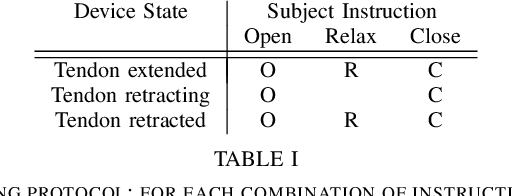
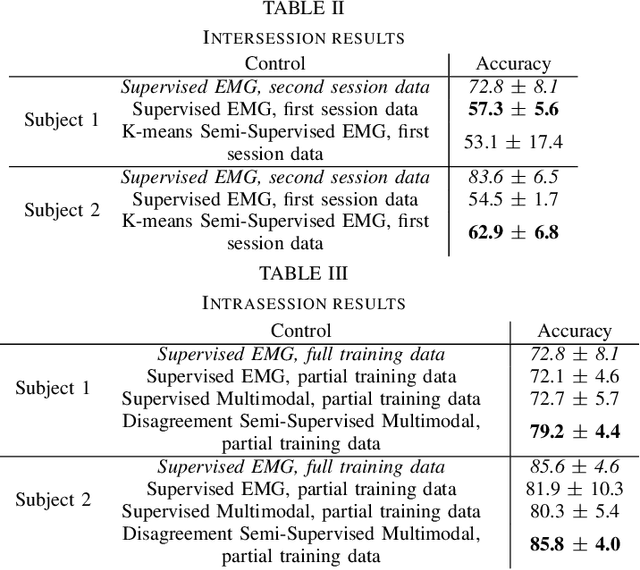
In order to provide therapy in a functional context, controls for wearable orthoses need to be robust and intuitive. We have previously introduced an intuitive, user-driven, EMG based orthotic control, but the process of training a control which is robust to concept drift (changes in the input signal) places a substantial burden on the user. In this paper, we explore semi-supervised learning as a paradigm for wearable orthotic controls. We are the first to use semi-supervised learning for an orthotic application. We propose a K-means semi-supervision and a disagreement-based semi-supervision algorithm. This is an exploratory study designed to determine the feasibility of semi-supervised learning as a control paradigm for wearable orthotics. In offline experiments with stroke subjects, we show that these algorithms have the potential to reduce the training burden placed on the user, and that they merit further study.
User-Driven Functional Movement Training with a Wearable Hand Robot after Stroke
Nov 18, 2019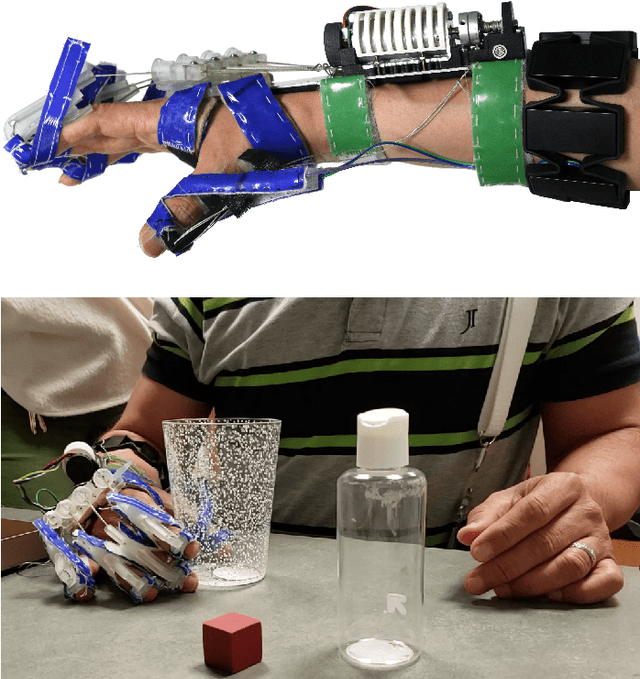

We studied the performance of a robotic orthosis designed to assist the paretic hand after stroke. This orthosis is designed to be wearable and fully user-controlled, allowing it to serve two possible roles: as a rehabilitation device, designed to be integrated in device-mediated rehabilitation exercises to improve performance of the affected upper limb without device assistance; or as an assistive device, designed to be integrated into daily wear to improve performance of the affected limb with grasping tasks. We present the clinical outcomes of a study designed as a feasibility test for these hypotheses. 11 participants with chronic stroke engaged in a month-long training protocol using the orthosis. Individuals were evaluated using standard outcome measures, both with and without orthosis assistance. Fugl-Meyer scores (unassisted) showed improvement focused specifically at the distal joints of the upper limb, and Action Research Arm Test (ARAT) scores (unassisted) also showed a positive trend. These results suggest the possibility of using our orthosis as a rehabilitative device for the hand. Assisted ARAT and Box and Block Test scores showed that the device can function in an assistive role for participants with minimal functional use of their hand at baseline. We believe these results highlight the potential for wearable and user-driven robotic hand orthoses to extend the use and training of the affected upper limb after stroke.
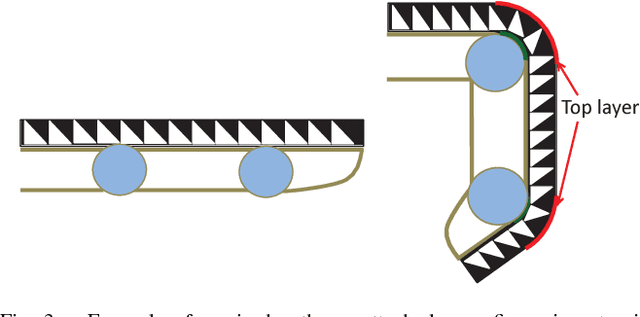
Multimodal Sensing and Interaction for a Robotic Hand Orthosis
Dec 18, 2018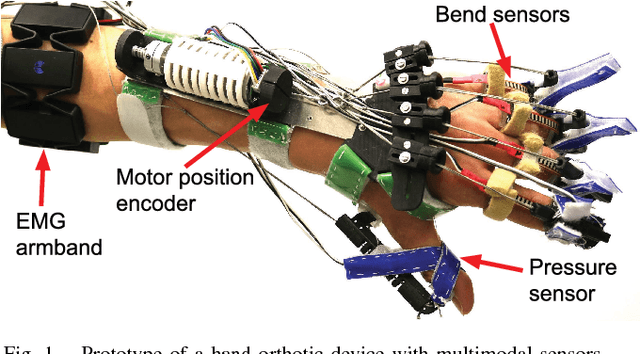
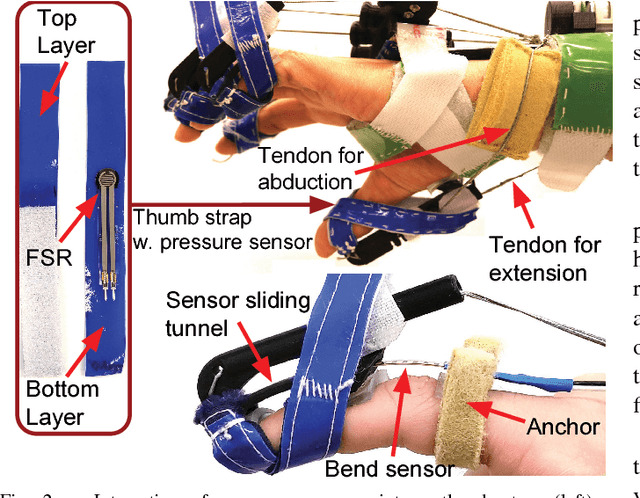
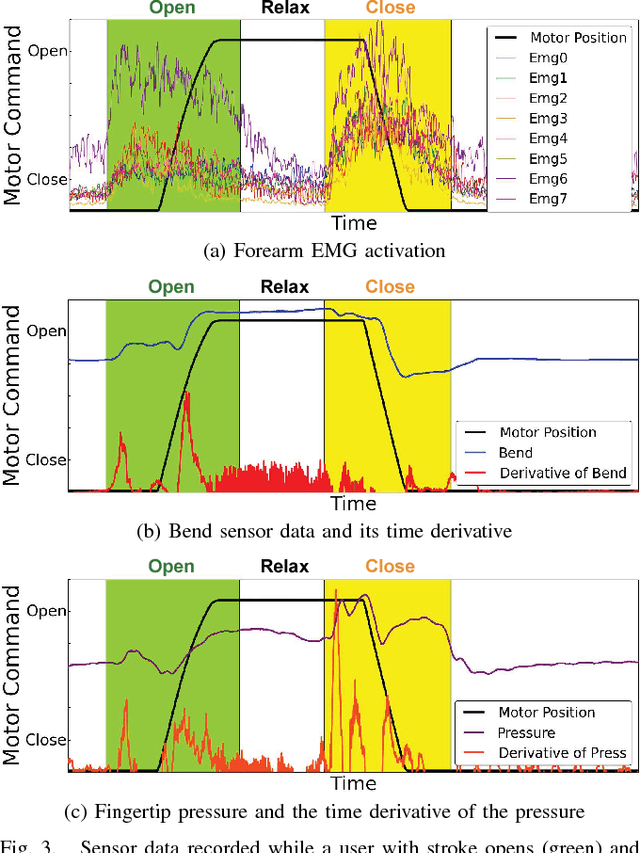
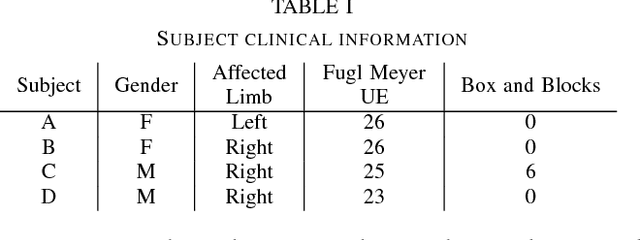
Wearable robotic hand rehabilitation devices can allow greater freedom and flexibility than their workstation-like counterparts. However, the field is generally lacking effective methods by which the user can operate the device: such controls must be effective, intuitive, and robust to the wide range of possible impairment patterns. Even when focusing on a specific condition, such as stroke, the variety of encountered upper limb impairment patterns means that a single sensing modality, such as electromyography (EMG), might not be sufficient to enable controls for a broad range of users. To address this significant gap, we introduce a multimodal sensing and interaction paradigm for an active hand orthosis. In our proof-of-concept implementation, EMG is complemented by other sensing modalities, such as finger bend and contact pressure sensors. We propose multimodal interaction methods that utilize this sensory data as input, and show they can enable tasks for stroke survivors who exhibit different impairment patterns. We believe that robotic hand orthoses developed as multimodal sensory platforms with help address some of the key challenges in physical interaction with the user.
* 8 pages. 9 Figures. IEEE Robotics and Automation Letters. Preprint version. Accepted Dec, 2018
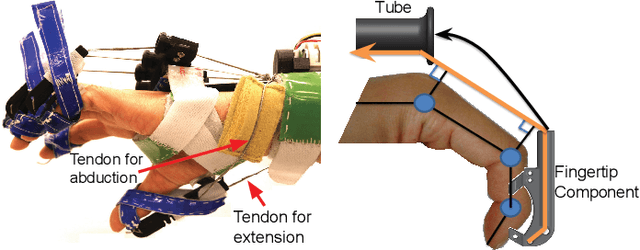
Design and Development of Effective Transmission Mechanisms on a Tendon Driven Hand Orthosis for Stroke Patients
Jul 31, 2018

Tendon-driven hand orthoses have advantages over exoskeletons with respect to wearability and safety because of their low-profile design and ability to fit a range of patients without requiring custom joint alignment. However, no existing study on a wearable tendon-driven hand orthosis for stroke patients presents evidence that such devices can overcome spasticity given repeated use and fatigue, or discusses transmission efficiency. In this study, we propose two designs that provide effective force transmission by increasing moment arms around finger joints. We evaluate the designs with geometric models and experiment using a 3D-printed artificial finger to find force and joint angle characteristics of the suggested structures. We also perform clinical tests with stroke patients to demonstrate the feasibility of the designs. The testing supports the hypothesis that the proposed designs efficiently elicit extension of the digits in patients with spasticity as compared to existing baselines.