 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-Supervised Intent Inferral Using Ipsilateral Biosignals on a Hand Orthosis for Stroke Subjects
Oct 30, 2020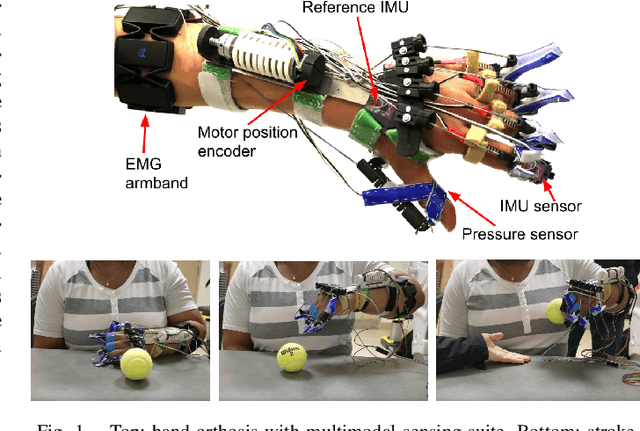

In order to provide therapy in a functional context, controls for wearable orthoses need to be robust and intuitive. We have previously introduced an intuitive, user-driven, EMG based orthotic control, but the process of training a control which is robust to concept drift (changes in the input signal) places a substantial burden on the user. In this paper, we explore semi-supervised learning as a paradigm for wearable orthotic controls. We are the first to use semi-supervised learning for an orthotic application. We propose a K-means semi-supervision and a disagreement-based semi-supervision algorithm. This is an exploratory study designed to determine the feasibility of semi-supervised learning as a control paradigm for wearable orthotics. In offline experiments with stroke subjects, we show that these algorithms have the potential to reduce the training burden placed on the user, and that they merit further study.