 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-Supervised Intent Inferral Using Ipsilateral Biosignals on a Hand Orthosis for Stroke Subjects
Oct 30, 2020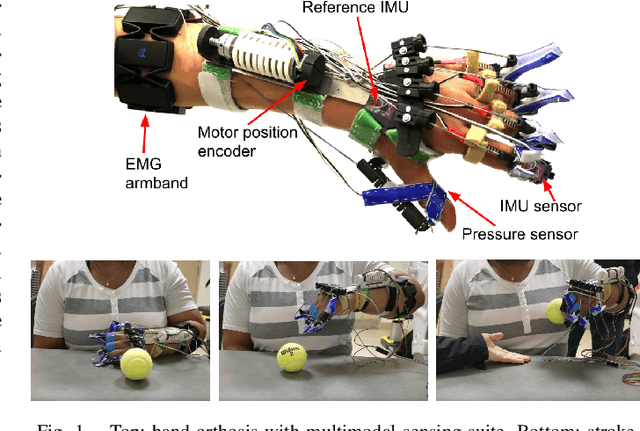

In order to provide therapy in a functional context, controls for wearable orthoses need to be robust and intuitive. We have previously introduced an intuitive, user-driven, EMG based orthotic control, but the process of training a control which is robust to concept drift (changes in the input signal) places a substantial burden on the user. In this paper, we explore semi-supervised learning as a paradigm for wearable orthotic controls. We are the first to use semi-supervised learning for an orthotic application. We propose a K-means semi-supervision and a disagreement-based semi-supervision algorithm. This is an exploratory study designed to determine the feasibility of semi-supervised learning as a control paradigm for wearable orthotics. In offline experiments with stroke subjects, we show that these algorithms have the potential to reduce the training burden placed on the user, and that they merit further study.
User-Driven Functional Movement Training with a Wearable Hand Robot after Stroke
Nov 18, 2019

We studied the performance of a robotic orthosis designed to assist the paretic hand after stroke. This orthosis is designed to be wearable and fully user-controlled, allowing it to serve two possible roles: as a rehabilitation device, designed to be integrated in device-mediated rehabilitation exercises to improve performance of the affected upper limb without device assistance; or as an assistive device, designed to be integrated into daily wear to improve performance of the affected limb with grasping tasks. We present the clinical outcomes of a study designed as a feasibility test for these hypotheses. 11 participants with chronic stroke engaged in a month-long training protocol using the orthosis. Individuals were evaluated using standard outcome measures, both with and without orthosis assistance. Fugl-Meyer scores (unassisted) showed improvement focused specifically at the distal joints of the upper limb, and Action Research Arm Test (ARAT) scores (unassisted) also showed a positive trend. These results suggest the possibility of using our orthosis as a rehabilitative device for the hand. Assisted ARAT and Box and Block Test scores showed that the device can function in an assistive role for participants with minimal functional use of their hand at baseline. We believe these results highlight the potential for wearable and user-driven robotic hand orthoses to extend the use and training of the affected upper limb after stroke.