 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Development of Effective Transmission Mechanisms on a Tendon Driven Hand Orthosis for Stroke Patients
Paper and Code
Jul 31, 2018

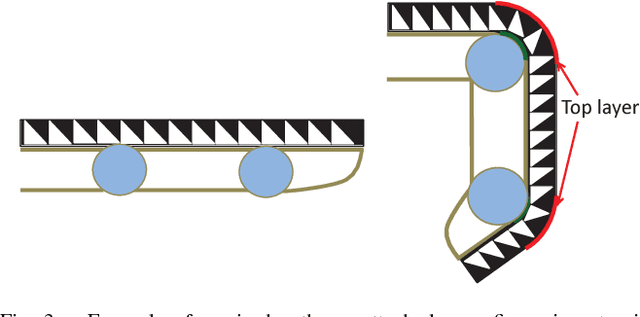
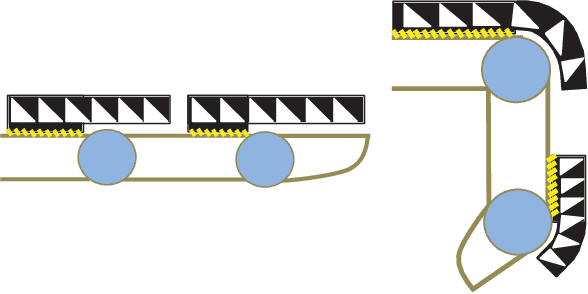
Tendon-driven hand orthoses have advantages over exoskeletons with respect to wearability and safety because of their low-profile design and ability to fit a range of patients without requiring custom joint alignment. However, no existing study on a wearable tendon-driven hand orthosis for stroke patients presents evidence that such devices can overcome spasticity given repeated use and fatigue, or discusses transmission efficiency. In this study, we propose two designs that provide effective force transmission by increasing moment arms around finger joints. We evaluate the designs with geometric models and experiment using a 3D-printed artificial finger to find force and joint angle characteristics of the suggested structures. We also perform clinical tests with stroke patients to demonstrate the feasibility of the designs. The testing supports the hypothesis that the proposed designs efficiently elicit extension of the digits in patients with spasticity as compared to existing baselines.