 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Feasibility of Wearable Exotendon Networks for Whole-Hand Movement Patterns in Stroke Patients
Paper and Code
Dec 19, 2017
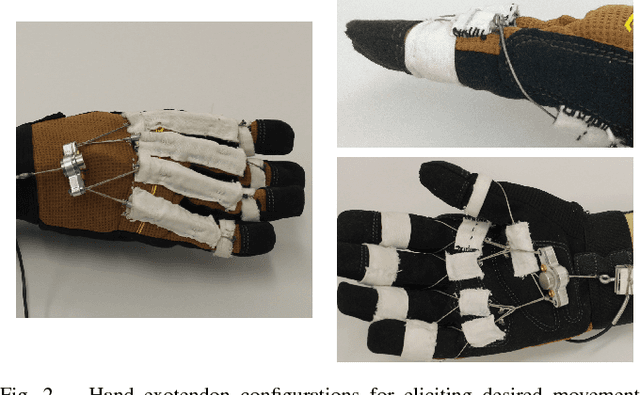
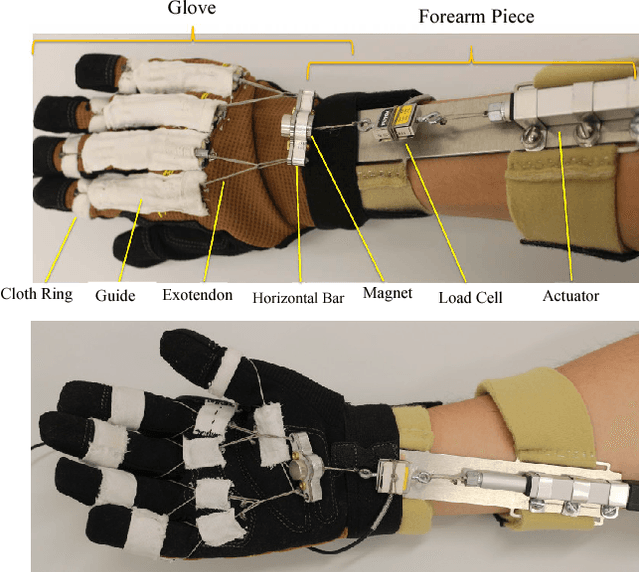
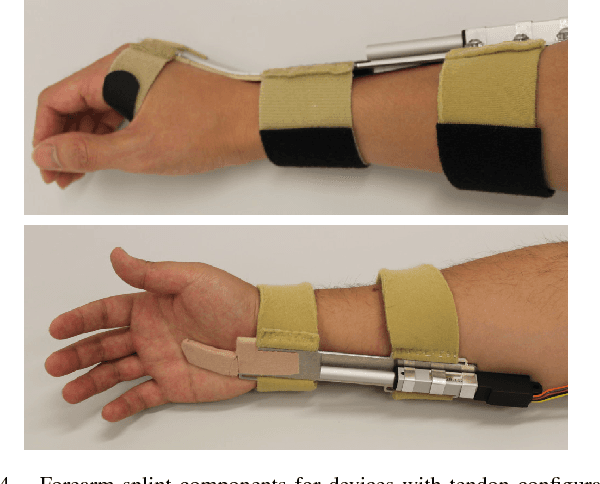
Fully wearable hand rehabilitation and assistive devices could extend training and improve quality of life for patients affected by hand impairments. However, such devices must deliver meaningful manipulation capabilities in a small and lightweight package. In this context, this paper investigates the capability of single-actuator devices to assist whole-hand movement patterns through a network of exotendons. Our prototypes combine a single linear actuator (mounted on a forearm splint) with a network of exotendons (routed on the surface of a soft glove). We investigated two possible tendon network configurations: one that produces full finger extension (overcoming flexor spasticity), and one that combines proximal flexion with distal extension at each finger. In experiments with stroke survivors, we measured the force levels needed to overcome various levels of spasticity and open the hand for grasping using the first of these configurations, and qualitatively demonstrated the ability to execute fingertip grasps using the second. Our results support the feasibility of developing future wearable devices able to assist a range of manipulation tasks.