 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Coordination using Active Epistemic Inference
Jan 07, 2025A Multi-robot system (MRS) provides significant advantages for intricate tasks such as environmental monitoring, underwater inspections, and space missions. However, addressing potential communication failures or the lack of communication infrastructure in these fields remains a challenge. A significant portion of MRS research presumes that the system can maintain communication with proximity constraints, but this approach does not solve situations where communication is either non-existent, unreliable, or poses a security risk. Some approaches tackle this issue using predictions about other robots while not communicating, but these methods generally only permit agents to utilize first-order reasoning, which involves reasoning based purely on their own observations. In contrast, to deal with this problem, our proposed framework utilizes Theory of Mind (ToM), employing higher-order reasoning by shifting a robot's perspective to reason about a belief of others observations. Our approach has two main phases: i) an efficient runtime plan adaptation using active inference to signal intentions and reason about a robot's own belief and the beliefs of others in the system, and ii) a hierarchical epistemic planning framework to iteratively reason about the current MRS mission state. The proposed framework outperforms greedy and first-order reasoning approaches and is validated using simulations and experiments with heterogeneous robotic systems.
Take Your Best Shot: Sampling-Based Next-Best-View Planning for Autonomous Photography & Inspection
Mar 08, 2024



Autonomous mobile robots (AMRs) equipped with high-quality cameras have revolutionized the field of inspections by providing efficient and cost-effective means of conducting surveys. The use of autonomous inspection is becoming more widespread in a variety of contexts, yet it is still challenging to acquire the best inspection information autonomously. In situations where objects may block a robot's view, it is necessary to use reasoning to determine the optimal points for collecting data. Although researchers have explored cloud-based applications to store inspection data, these applications may not operate optimally under network constraints, and parsing these datasets can be manually intensive. Instead, there is an emerging requirement for AMRs to autonomously capture the most informative views efficiently. To address this challenge, we present an autonomous Next-Best-View (NBV) framework that maximizes the inspection information while reducing the number of pictures needed during operations. The framework consists of a formalized evaluation metric using ray-tracing and Gaussian process interpolation to estimate information reward based on the current understanding of the partially-known environment. A derivative-free optimization (DFO) method is used to sample candidate views in the environment and identify the NBV point. The proposed approach's effectiveness is shown by comparing it with existing methods and further validated through simulations and experiments with various vehicles.
Robust Online Epistemic Replanning of Multi-Robot Missions
Mar 01, 2024



As Multi-Robot Systems (MRS) become more affordable and computing capabilities grow, they provide significant advantages for complex applications such as environmental monitoring, underwater inspections, or space exploration. However, accounting for potential communication loss or the unavailability of communication infrastructures in these application domains remains an open problem. Much of the applicable MRS research assumes that the system can sustain communication through proximity regulations and formation control or by devising a framework for separating and adhering to a predetermined plan for extended periods of disconnection. The latter technique enables an MRS to be more efficient, but breakdowns and environmental uncertainties can have a domino effect throughout the system, particularly when the mission goal is intricate or time-sensitive. To deal with this problem, our proposed framework has two main phases: i) a centralized planner to allocate mission tasks by rewarding intermittent rendezvous between robots to mitigate the effects of the unforeseen events during mission execution, and ii) a decentralized replanning scheme leveraging epistemic planning to formalize belief propagation and a Monte Carlo tree search for policy optimization given distributed rational belief updates. The proposed framework outperforms a baseline heuristic and is validated using simulations and experiments with aerial vehicles.
Epistemic Planning for Heterogeneous Robotic Systems
Aug 03, 2023



In applications such as search and rescue or disaster relief, heterogeneous multi-robot systems (MRS) can provide significant advantages for complex objectives that require a suite of capabilities. However, within these application spaces, communication is often unreliable, causing inefficiencies or outright failures to arise in most MRS algorithms. Many researchers tackle this problem by requiring all robots to either maintain communication using proximity constraints or assuming that all robots will execute a predetermined plan over long periods of disconnection. The latter method allows for higher levels of efficiency in a MRS, but failures and environmental uncertainties can have cascading effects across the system, especially when a mission objective is complex or time-sensitive. To solve this, we propose an epistemic planning framework that allows robots to reason about the system state, leverage heterogeneous system makeups, and optimize information dissemination to disconnected neighbors. Dynamic epistemic logic formalizes the propagation of belief states, and epistemic task allocation and gossip is accomplished via a mixed integer program using the belief states for utility predictions and planning. The proposed framework is validated using simulations and experiments with heterogeneous vehicles.
Epistemic Prediction and Planning with Implicit Coordination for Multi-Robot Teams in Communication Restricted Environments
Feb 21, 2023



In communication restricted environments, a multi-robot system can be deployed to either: i) maintain constant communication but potentially sacrifice operational efficiency due to proximity constraints or ii) allow disconnections to increase environmental coverage efficiency, challenges on how, when, and where to reconnect (rendezvous problem). In this work we tackle the latter problem and notice that most state-of-the-art methods assume that robots will be able to execute a predetermined plan; however system failures and changes in environmental conditions can cause the robots to deviate from the plan with cascading effects across the multi-robot system. This paper proposes a coordinated epistemic prediction and planning framework to achieve consensus without communicating for exploration and coverage, task discovery and completion, and rendezvous applications. Dynamic epistemic logic is the principal component implemented to allow robots to propagate belief states and empathize with other agents. Propagation of belief states and subsequent coverage of the environment is achieved via a frontier-based method within an artificial physics-based framework. The proposed framework is validated with both simulations and experiments with unmanned ground vehicles in various cluttered environments.
Autonomous Ground Navigation in Highly Constrained Spaces: Lessons learned from The BARN Challenge at ICRA 2022
Aug 22, 2022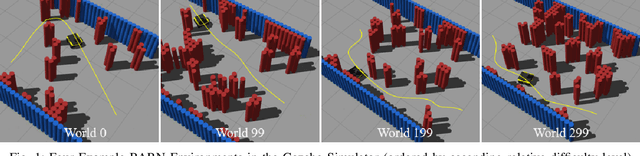
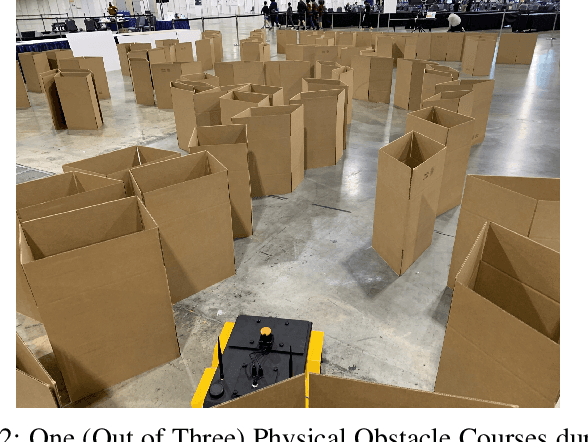
The BARN (Benchmark Autonomous Robot Navigation) Challenge took place at the 2022 IEEE International Conference on Robotics and Automation (ICRA 2022) in Philadelphia, PA. The aim of the challenge was to evaluate state-of-the-art autonomous ground navigation systems for moving robots through highly constrained environments in a safe and efficient manner. Specifically, the task was to navigate a standardized, differential-drive ground robot from a predefined start location to a goal location as quickly as possible without colliding with any obstacles, both in simulation and in the real world. Five teams from all over the world participated in the qualifying simulation competition, three of which were invited to compete with each other at a set of physical obstacle courses at the conference center in Philadelphia. The competition results suggest that autonomous ground navigation in highly constrained spaces, despite seeming ostensibly simple even for experienced roboticists, is actually far from being a solved problem. In this article, we discuss the challenge, the approaches used by the top three winning teams, and lessons learned to direct future research.