 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Schwarz-Christoffel Mapping-based Framework for Sim-to-Real Transfer in Autonomous Robot Operations
Mar 20, 2025



Despite the remarkable acceleration of robotic development through advanced simulation technology, robotic applications are often subject to performance reductions in real-world deployment due to the inherent discrepancy between simulation and reality, often referred to as the "sim-to-real gap". This gap arises from factors like model inaccuracies, environmental variations, and unexpected disturbances. Similarly, model discrepancies caused by system degradation over time or minor changes in the system's configuration also hinder the effectiveness of the developed methodologies. Effectively closing these gaps is critical and remains an open challenge. This work proposes a lightweight conformal mapping framework to transfer control and planning policies from an expert teacher to a degraded less capable learner. The method leverages Schwarz-Christoffel Mapping (SCM) to geometrically map teacher control inputs into the learner's command space, ensuring maneuver consistency. To demonstrate its generality, the framework is applied to two representative types of control and planning methods in a path-tracking task: 1) a discretized motion primitives command transfer and 2) a continuous Model Predictive Control (MPC)-based command transfer. The proposed framework is validated through extensive simulations and real-world experiments, demonstrating its effectiveness in reducing the sim-to-real gap by closely transferring teacher commands to the learner robot.
Take Your Best Shot: Sampling-Based Next-Best-View Planning for Autonomous Photography & Inspection
Mar 08, 2024



Autonomous mobile robots (AMRs) equipped with high-quality cameras have revolutionized the field of inspections by providing efficient and cost-effective means of conducting surveys. The use of autonomous inspection is becoming more widespread in a variety of contexts, yet it is still challenging to acquire the best inspection information autonomously. In situations where objects may block a robot's view, it is necessary to use reasoning to determine the optimal points for collecting data. Although researchers have explored cloud-based applications to store inspection data, these applications may not operate optimally under network constraints, and parsing these datasets can be manually intensive. Instead, there is an emerging requirement for AMRs to autonomously capture the most informative views efficiently. To address this challenge, we present an autonomous Next-Best-View (NBV) framework that maximizes the inspection information while reducing the number of pictures needed during operations. The framework consists of a formalized evaluation metric using ray-tracing and Gaussian process interpolation to estimate information reward based on the current understanding of the partially-known environment. A derivative-free optimization (DFO) method is used to sample candidate views in the environment and identify the NBV point. The proposed approach's effectiveness is shown by comparing it with existing methods and further validated through simulations and experiments with various vehicles.
Epistemic Prediction and Planning with Implicit Coordination for Multi-Robot Teams in Communication Restricted Environments
Feb 21, 2023



In communication restricted environments, a multi-robot system can be deployed to either: i) maintain constant communication but potentially sacrifice operational efficiency due to proximity constraints or ii) allow disconnections to increase environmental coverage efficiency, challenges on how, when, and where to reconnect (rendezvous problem). In this work we tackle the latter problem and notice that most state-of-the-art methods assume that robots will be able to execute a predetermined plan; however system failures and changes in environmental conditions can cause the robots to deviate from the plan with cascading effects across the multi-robot system. This paper proposes a coordinated epistemic prediction and planning framework to achieve consensus without communicating for exploration and coverage, task discovery and completion, and rendezvous applications. Dynamic epistemic logic is the principal component implemented to allow robots to propagate belief states and empathize with other agents. Propagation of belief states and subsequent coverage of the environment is achieved via a frontier-based method within an artificial physics-based framework. The proposed framework is validated with both simulations and experiments with unmanned ground vehicles in various cluttered environments.
A Conformal Mapping-based Framework for Robot-to-Robot and Sim-to-Real Transfer Learning
Sep 19, 2021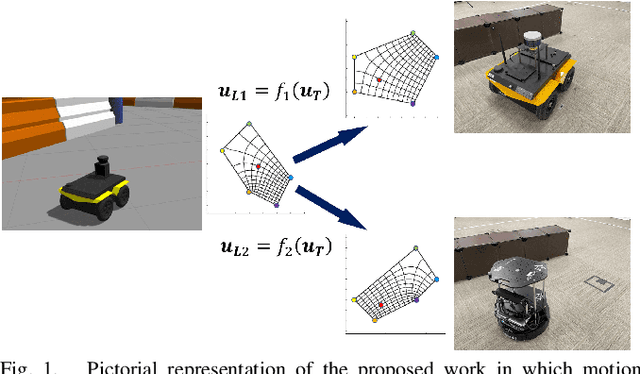

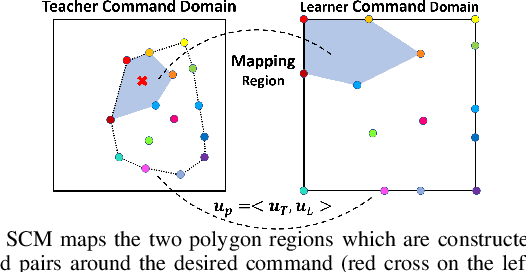
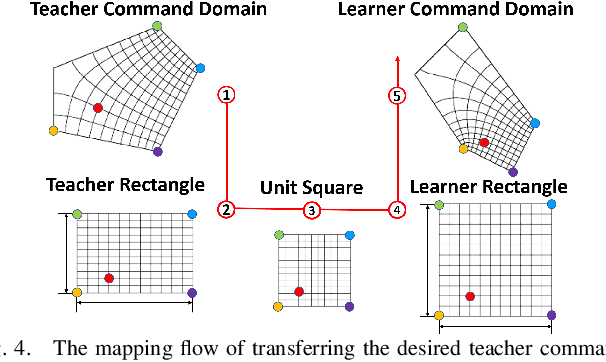
This paper presents a novel method for transferring motion planning and control policies between a teacher and a learner robot. With this work, we propose to reduce the sim-to-real gap, transfer knowledge designed for a specific system into a different robot, and compensate for system aging and failures. To solve this problem we introduce a Schwarz-Christoffel mapping-based method to geometrically stretch and fit the control inputs from the teacher into the learner command space. We also propose a method based on primitive motion generation to create motion plans and control inputs compatible with the learner's capabilities. Our approach is validated with simulations and experiments with different robotic systems navigating occluding environments.
Model-based Randomness Monitor for Stealthy Sensor Attacks
May 16, 2020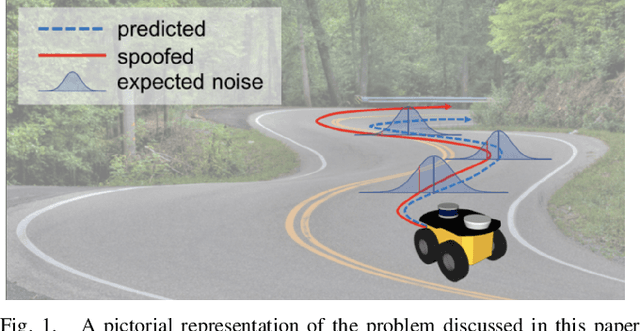
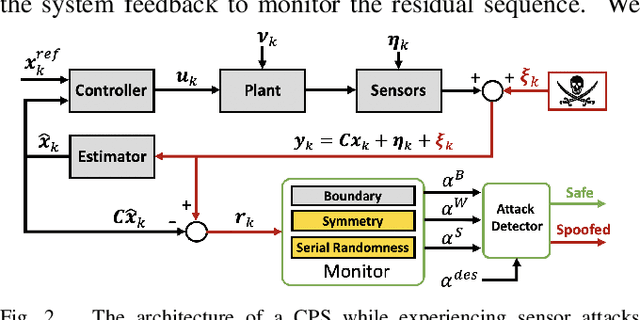
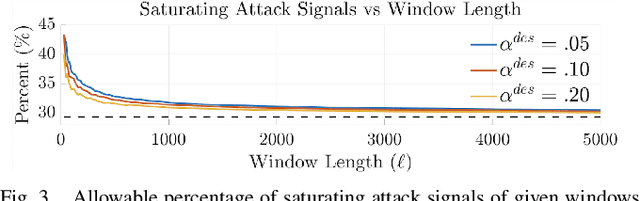
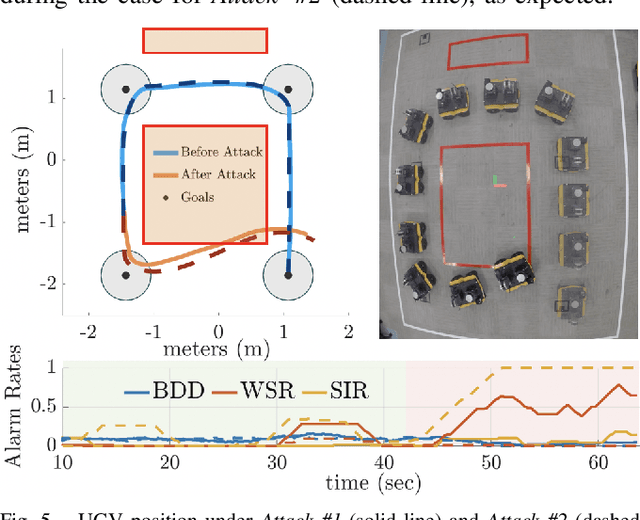
Malicious attacks on modern autonomous cyber-physical systems (CPSs) can leverage information about the system dynamics and noise characteristics to hide while hijacking the system toward undesired states. Given attacks attempting to hide within the system noise profile to remain undetected, an attacker with the intent to hijack a system will alter sensor measurements, contradicting with what is expected by the system's model. To deal with this problem, in this paper we present a framework to detect non-randomness in sensor measurements on CPSs under the effect of sensor attacks. Specifically, we propose a run-time monitor that leverages two statistical tests, the Wilcoxon Signed-Rank test and Serial Independence Runs test to detect inconsistent patterns in the measurement data. For the proposed statistical tests we provide formal guarantees and bounds for attack detection. We validate our approach through simulations and experiments on an unmanned ground vehicle (UGV) under stealthy attacks and compare our framework with other anomaly detectors.