 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCategorical Robustness Assessment for Machine Learning based Network Intrusion Detection Systems
Jun 10, 2026Network Intrusion Detection Systems (NIDS) heavily utlize Machine Learning (ML) but ML models can be manipulated via adversarial attacks. These attacks add carefully crafted perturbations to network traffic data that leads to misclassifications. While prior work has demonstrated adversarial vulnerabilities in isolated settings, systematic cross-architecture as well as class and category of attack based comparisons under controlled attack conditions remain limited, leaving practitioners without clear guidance on which models to deploy in adversarial environments. This paper asks a simple question: what type of classifier architectures actually hold up when attackers try to manipulate the systems? We put three popular architectures through their paces: a 1D Convolutional Neural Network, a Long Short-Term Memory (LSTM) network, and a Random Forest (RF) ensemble. Using the ACI-IoT-2023 dataset (over 1.2 million samples spanning 12 attack types), we subject each model with FGSM and PGD adversarial attacks, which apply gradient-based perturbations in normalized feature space consistent with established adversarial ML evaluation protocols, at perturbation budgets ranging from $ε=0.01$ to $ε=0.1$. Surprisingly, Random Forest achieved near-perfect baseline accuracy (99.98\%), yet collapsed catastrophically under attack, dropping 73 percentage points at the smallest perturbation we tested. CNN, on the other hand, retained 95.5\% accuracy at $ε=0.01$ and degraded gracefully as perturbations increased. LSTM fell somewhere in between. These findings flip the conventional wisdom where high baseline accuracy means nothing if a model shatters at the first sign of adversarial pressure. For practitioners deploying intrusion detection in adversarial environments, we recommend CNN-based architectures and provide scenario-specific deployment guidance.
Temporally Consistent Unsupervised Segmentation for Mobile Robot Perception
Jul 29, 2025Rapid progress in terrain-aware autonomous ground navigation has been driven by advances in supervised semantic segmentation. However, these methods rely on costly data collection and labor-intensive ground truth labeling to train deep models. Furthermore, autonomous systems are increasingly deployed in unrehearsed, unstructured environments where no labeled data exists and semantic categories may be ambiguous or domain-specific. Recent zero-shot approaches to unsupervised segmentation have shown promise in such settings but typically operate on individual frames, lacking temporal consistency-a critical property for robust perception in unstructured environments. To address this gap we introduce Frontier-Seg, a method for temporally consistent unsupervised segmentation of terrain from mobile robot video streams. Frontier-Seg clusters superpixel-level features extracted from foundation model backbones-specifically DINOv2-and enforces temporal consistency across frames to identify persistent terrain boundaries or frontiers without human supervision. We evaluate Frontier-Seg on a diverse set of benchmark datasets-including RUGD and RELLIS-3D-demonstrating its ability to perform unsupervised segmentation across unstructured off-road environments.
Adaptive Pruning of Deep Neural Networks for Resource-Aware Embedded Intrusion Detection on the Edge
May 20, 2025Artificial neural network pruning is a method in which artificial neural network sizes can be reduced while attempting to preserve the predicting capabilities of the network. This is done to make the model smaller or faster during inference time. In this work we analyze the ability of a selection of artificial neural network pruning methods to generalize to a new cybersecurity dataset utilizing a simpler network type than was designed for. We analyze each method using a variety of pruning degrees to best understand how each algorithm responds to the new environment. This has allowed us to determine the most well fit pruning method of those we searched for the task. Unexpectedly, we have found that many of them do not generalize to the problem well, leaving only a few algorithms working to an acceptable degree.
Bridging the Data Gap in AI Reliability Research and Establishing DR-AIR, a Comprehensive Data Repository for AI Reliability
Feb 17, 2025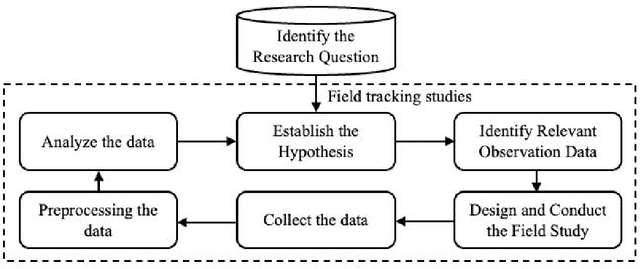
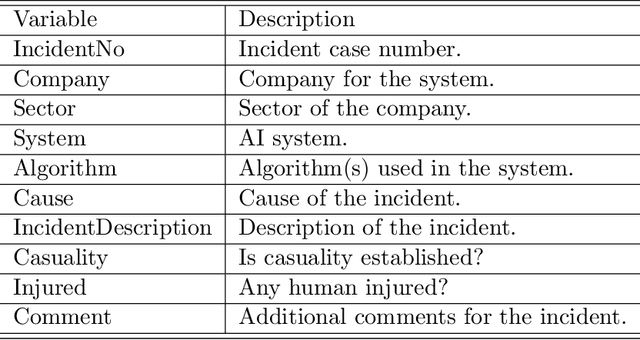
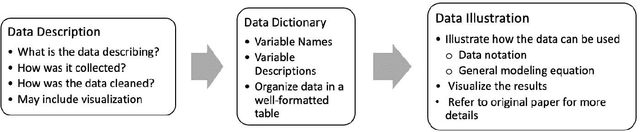
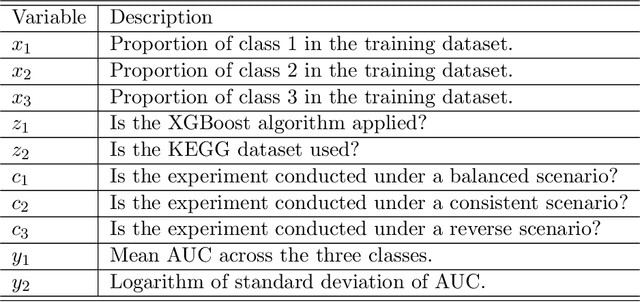
Artificial intelligence (AI) technology and systems have been advancing rapidly. However, ensuring the reliability of these systems is crucial for fostering public confidence in their use. This necessitates the modeling and analysis of reliability data specific to AI systems. A major challenge in AI reliability research, particularly for those in academia, is the lack of readily available AI reliability data. To address this gap, this paper focuses on conducting a comprehensive review of available AI reliability data and establishing DR-AIR: a data repository for AI reliability. Specifically, we introduce key measurements and data types for assessing AI reliability, along with the methodologies used to collect these data. We also provide a detailed description of the currently available datasets with illustrative examples. Furthermore, we outline the setup of the DR-AIR repository and demonstrate its practical applications. This repository provides easy access to datasets specifically curated for AI reliability research. We believe these efforts will significantly benefit the AI research community by facilitating access to valuable reliability data and promoting collaboration across various academic domains within AI. We conclude our paper with a call to action, encouraging the research community to contribute and share AI reliability data to further advance this critical field of study.
Predicting Resilience with Neural Networks
Aug 11, 2023Resilience engineering studies the ability of a system to survive and recover from disruptive events, which finds applications in several domains. Most studies emphasize resilience metrics to quantify system performance, whereas recent studies propose statistical modeling approaches to project system recovery time after degradation. Moreover, past studies are either performed on data after recovering or limited to idealized trends. Therefore, this paper proposes three alternative neural network (NN) approaches including (i) Artificial Neural Networks, (ii) Recurrent Neural Networks, and (iii) Long-Short Term Memory (LSTM) to model and predict system performance, including negative and positive factors driving resilience to quantify the impact of disruptive events and restorative activities. Goodness-of-fit measures are computed to evaluate the models and compared with a classical statistical model, including mean squared error and adjusted R squared. Our results indicate that NN models outperformed the traditional model on all goodness-of-fit measures. More specifically, LSTMs achieved an over 60\% higher adjusted R squared, and decreased predictive error by 34-fold compared to the traditional method. These results suggest that NN models to predict resilience are both feasible and accurate and may find practical use in many important domains.
A Mapping of Assurance Techniques for Learning Enabled Autonomous Systems to the Systems Engineering Lifecycle
Dec 30, 2022
Learning enabled autonomous systems provide increased capabilities compared to traditional systems. However, the complexity of and probabilistic nature in the underlying methods enabling such capabilities present challenges for current systems engineering processes for assurance, and test, evaluation, verification, and validation (TEVV). This paper provides a preliminary attempt to map recently developed technical approaches in the assurance and TEVV of learning enabled autonomous systems (LEAS) literature to a traditional systems engineering v-model. This mapping categorizes such techniques into three main approaches: development, acquisition, and sustainment. We review the latest techniques to develop safe, reliable, and resilient learning enabled autonomous systems, without recommending radical and impractical changes to existing systems engineering processes. By performing this mapping, we seek to assist acquisition professionals by (i) informing comprehensive test and evaluation planning, and (ii) objectively communicating risk to leaders.
Automating Staged Rollout with Reinforcement Learning
Apr 01, 2022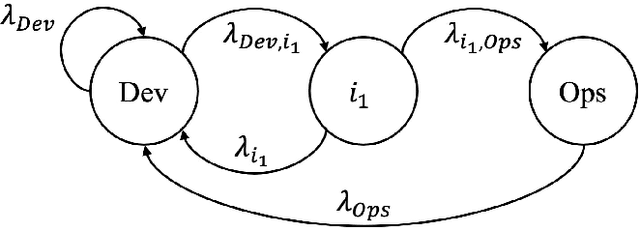
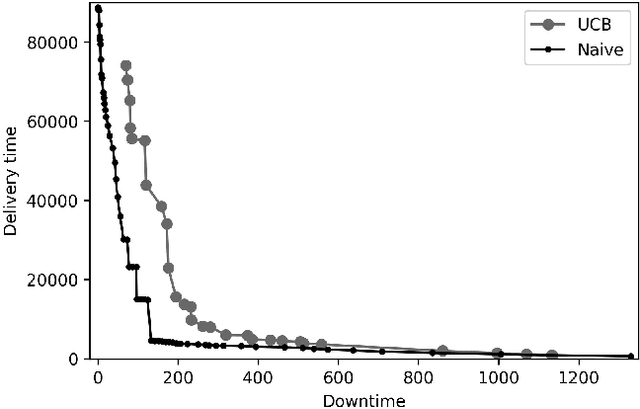
Staged rollout is a strategy of incrementally releasing software updates to portions of the user population in order to accelerate defect discovery without incurring catastrophic outcomes such as system wide outages. Some past studies have examined how to quantify and automate staged rollout, but stop short of simultaneously considering multiple product or process metrics explicitly. This paper demonstrates the potential to automate staged rollout with multi-objective reinforcement learning in order to dynamically balance stakeholder needs such as time to deliver new features and downtime incurred by failures due to latent defects.
Risk Averse Bayesian Reward Learning for Autonomous Navigation from Human Demonstration
Jul 31, 2021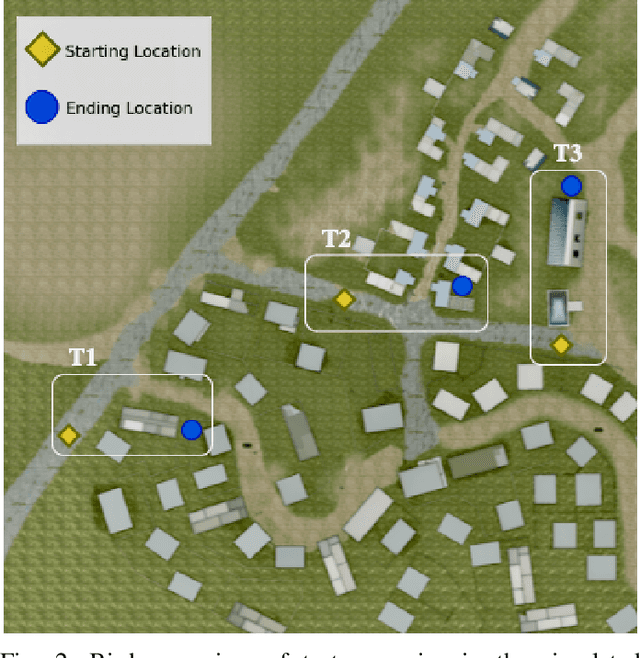

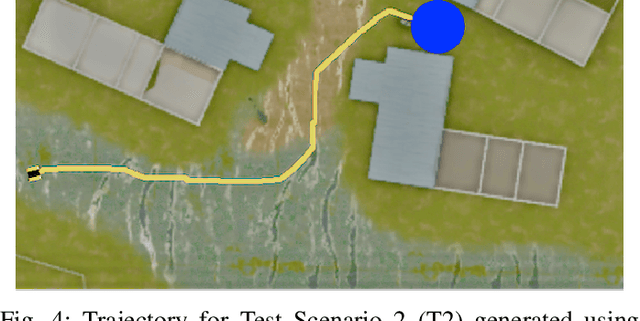
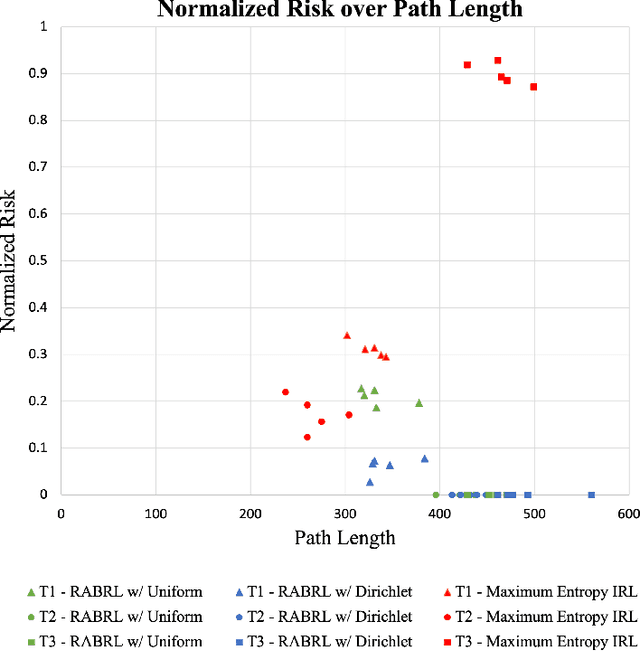
Traditional imitation learning provides a set of methods and algorithms to learn a reward function or policy from expert demonstrations. Learning from demonstration has been shown to be advantageous for navigation tasks as it allows for machine learning non-experts to quickly provide information needed to learn complex traversal behaviors. However, a minimal set of demonstrations is unlikely to capture all relevant information needed to achieve the desired behavior in every possible future operational environment. Due to distributional shift among environments, a robot may encounter features that were rarely or never observed during training for which the appropriate reward value is uncertain, leading to undesired outcomes. This paper proposes a Bayesian technique which quantifies uncertainty over the weights of a linear reward function given a dataset of minimal human demonstrations to operate safely in dynamic environments. This uncertainty is quantified and incorporated into a risk averse set of weights used to generate cost maps for planning. Experiments in a 3-D environment with a simulated robot show that our proposed algorithm enables a robot to avoid dangerous terrain completely in two out of three test scenarios and accumulates a lower amount of risk than related approaches in all scenarios without requiring any additional demonstrations.