 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Set Semantic Uncertainty Aware Metric-Semantic Graph Matching
Sep 17, 2024Underwater object-level mapping requires incorporating visual foundation models to handle the uncommon and often previously unseen object classes encountered in marine scenarios. In this work, a metric of semantic uncertainty for open-set object detections produced by visual foundation models is calculated and then incorporated into an object-level uncertainty tracking framework. Object-level uncertainties and geometric relationships between objects are used to enable robust object-level loop closure detection for unknown object classes. The above loop closure detection problem is formulated as a graph-matching problem. While graph matching, in general, is NP-Complete, a solver for an equivalent formulation of the proposed graph matching problem as a graph editing problem is tested on multiple challenging underwater scenes. Results for this solver as well as three other solvers demonstrate that the proposed methods are feasible for real-time use in marine environments for the robust, open-set, multi-object, semantic-uncertainty-aware loop closure detection. Further experimental results on the KITTI dataset demonstrate that the method generalizes to large-scale terrestrial scenes.
LOSS-SLAM: Lightweight Open-Set Semantic Simultaneous Localization and Mapping
Apr 05, 2024



Enabling robots to understand the world in terms of objects is a critical building block towards higher level autonomy. The success of foundation models in vision has created the ability to segment and identify nearly all objects in the world. However, utilizing such objects to localize the robot and build an open-set semantic map of the world remains an open research question. In this work, a system of identifying, localizing, and encoding objects is tightly coupled with probabilistic graphical models for performing open-set semantic simultaneous localization and mapping (SLAM). Results are presented demonstrating that the proposed lightweight object encoding can be used to perform more accurate object-based SLAM than existing open-set methods, closed-set methods, and geometric methods while incurring a lower computational overhead than existing open-set mapping methods.
Opti-Acoustic Semantic SLAM with Unknown Objects in Underwater Environments
Mar 19, 2024Despite recent advances in semantic Simultaneous Localization and Mapping (SLAM) for terrestrial and aerial applications, underwater semantic SLAM remains an open and largely unaddressed research problem due to the unique sensing modalities and the object classes found underwater. This paper presents an object-based semantic SLAM method for underwater environments that can identify, localize, classify, and map a wide variety of marine objects without a priori knowledge of the object classes present in the scene. The method performs unsupervised object segmentation and object-level feature aggregation, and then uses opti-acoustic sensor fusion for object localization. Probabilistic data association is used to determine observation to landmark correspondences. Given such correspondences, the method then jointly optimizes landmark and vehicle position estimates. Indoor and outdoor underwater datasets with a wide variety of objects and challenging acoustic and lighting conditions are collected for evaluation and made publicly available. Quantitative and qualitative results show the proposed method achieves reduced trajectory error compared to baseline methods, and is able to obtain comparable map accuracy to a baseline closed-set method that requires hand-labeled data of all objects in the scene.
NeuSE: Neural SE(3)-Equivariant Embedding for Consistent Spatial Understanding with Objects
Mar 13, 2023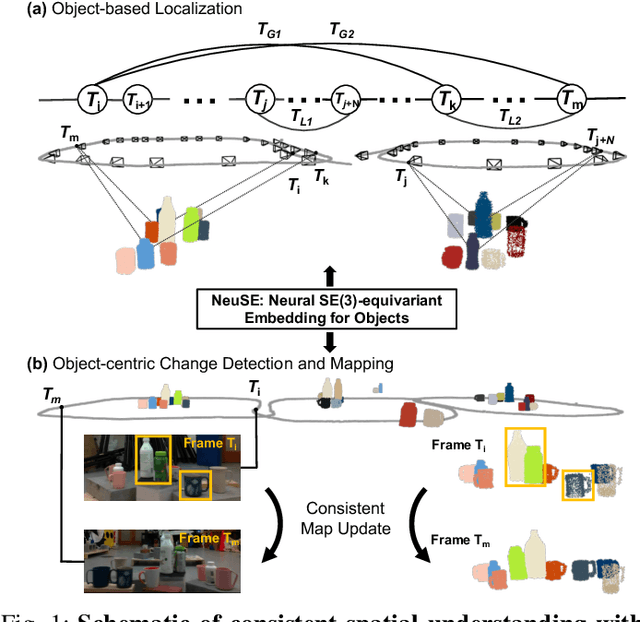
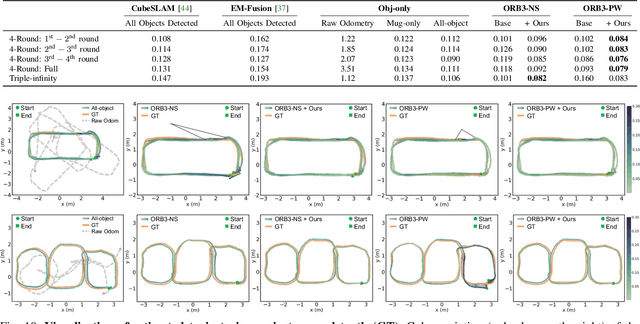
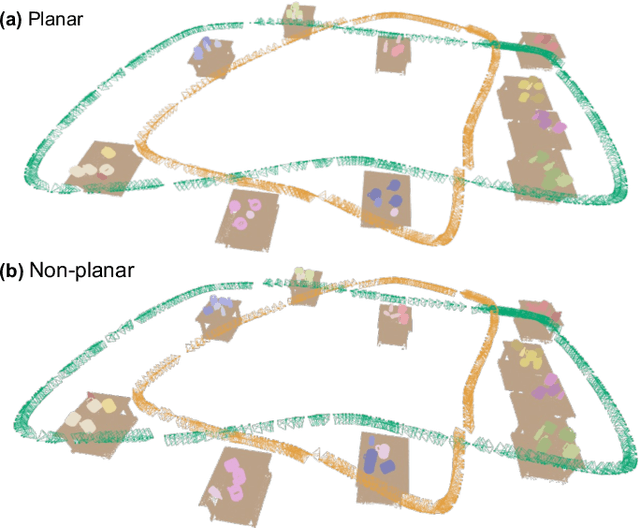
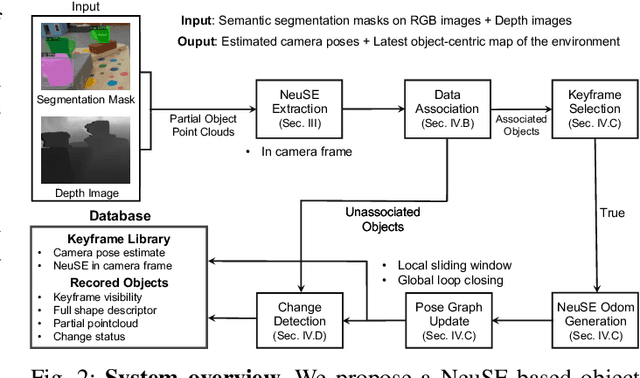
We present NeuSE, a novel Neural SE(3)-Equivariant Embedding for objects, and illustrate how it supports object SLAM for consistent spatial understanding with long-term scene changes. NeuSE is a set of latent object embeddings created from partial object observations. It serves as a compact point cloud surrogate for complete object models, encoding full shape information while transforming SE(3)-equivariantly in tandem with the object in the physical world. With NeuSE, relative frame transforms can be directly derived from inferred latent codes. Our proposed SLAM paradigm, using NeuSE for object shape and pose characterization, can operate independently or in conjunction with typical SLAM systems. It directly infers SE(3) camera pose constraints that are compatible with general SLAM pose graph optimization, while also maintaining a lightweight object-centric map that adapts to real-world changes. Our approach is evaluated on synthetic and real-world sequences featuring changed objects and shows improved localization accuracy and change-aware mapping capability, when working either standalone or jointly with a common SLAM pipeline.
Robust Change Detection Based on Neural Descriptor Fields
Aug 01, 2022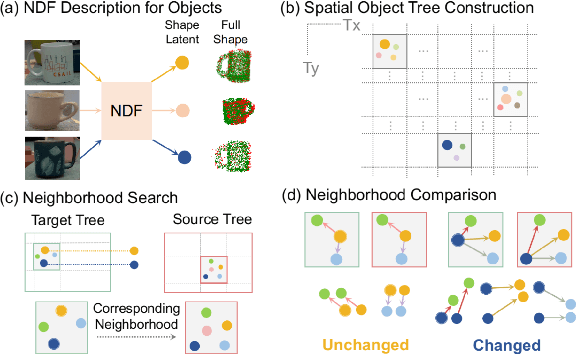
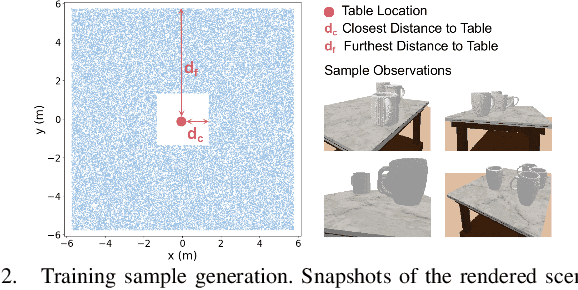
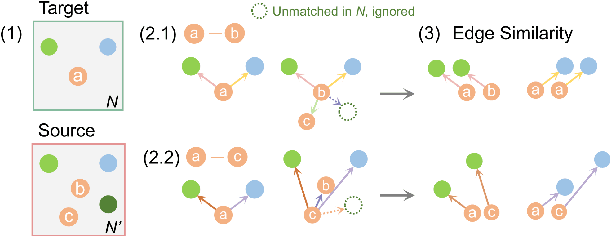
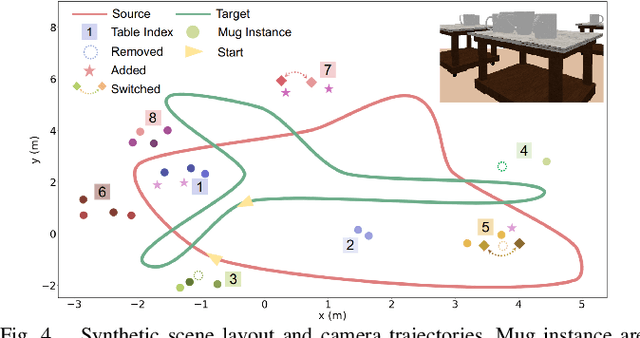
The ability to reason about changes in the environment is crucial for robots operating over extended periods of time. Agents are expected to capture changes during operation so that actions can be followed to ensure a smooth progression of the working session. However, varying viewing angles and accumulated localization errors make it easy for robots to falsely detect changes in the surrounding world due to low observation overlap and drifted object associations. In this paper, based on the recently proposed category-level Neural Descriptor Fields (NDFs), we develop an object-level online change detection approach that is robust to partially overlapping observations and noisy localization results. Utilizing the shape completion capability and SE(3)-equivariance of NDFs, we represent objects with compact shape codes encoding full object shapes from partial observations. The objects are then organized in a spatial tree structure based on object centers recovered from NDFs for fast queries of object neighborhoods. By associating objects via shape code similarity and comparing local object-neighbor spatial layout, our proposed approach demonstrates robustness to low observation overlap and localization noises. We conduct experiments on both synthetic and real-world sequences and achieve improved change detection results compared to multiple baseline methods. Project webpage: https://yilundu.github.io/ndf_change
Discrete-Continuous Smoothing and Mapping
Apr 25, 2022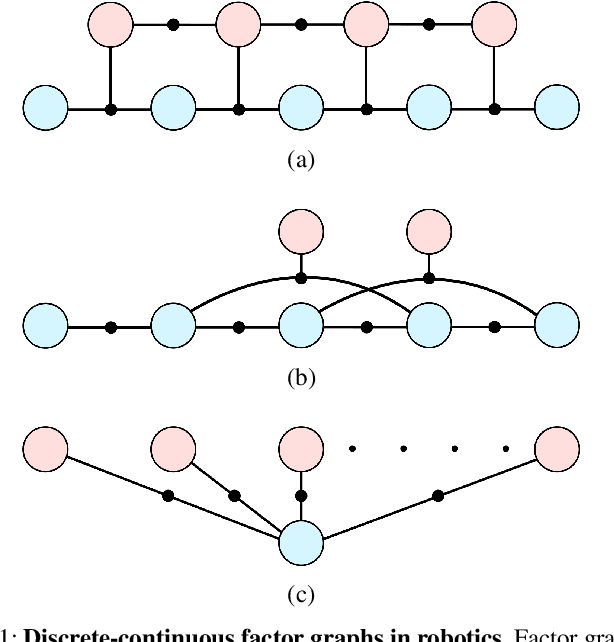
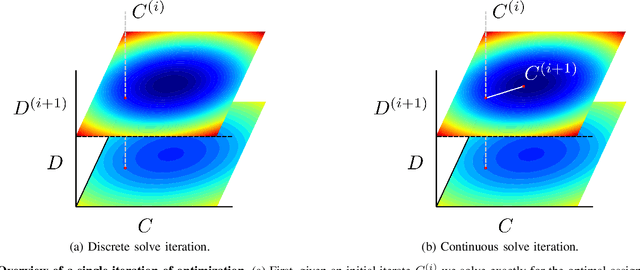


We describe a general approach to smoothing and mapping with a class of discrete-continuous factor graphs commonly encountered in robotics applications. While there are openly available tools providing flexible and easy-to-use interfaces for specifying and solving optimization problems formulated in terms of either discrete or continuous graphical models, at present, no similarly general tools exist enabling the same functionality for hybrid discrete-continuous problems. We aim to address this problem. In particular, we provide a library, DC-SAM, extending existing tools for optimization problems defined in terms of factor graphs to the setting of discrete-continuous models. A key contribution of our work is a novel solver for efficiently recovering approximate solutions to discrete-continuous optimization problems. The key insight to our approach is that while joint inference over continuous and discrete state spaces is often hard, many commonly encountered discrete-continuous problems can naturally be split into a "discrete part" and a "continuous part" that can individually be solved easily. Leveraging this structure, we optimize discrete and continuous variables in an alternating fashion. In consequence, our proposed work enables straightforward representation of and approximate inference in discrete-continuous graphical models. We also provide a method to recover the uncertainty in estimates of both discrete and continuous variables. We demonstrate the versatility of our approach through its application to three distinct robot perception applications: point-cloud registration, robust pose graph optimization, and object-based mapping and localization.