 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Change Detection Based on Neural Descriptor Fields
Paper and Code
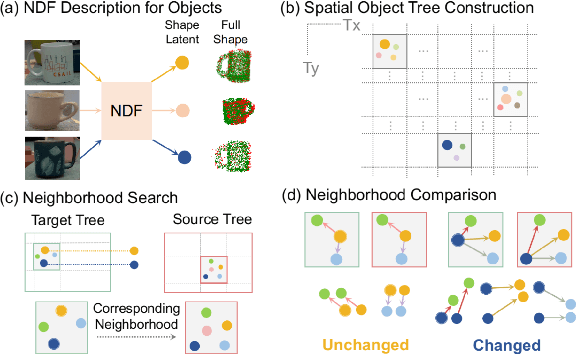
The ability to reason about changes in the environment is crucial for robots operating over extended periods of time. Agents are expected to capture changes during operation so that actions can be followed to ensure a smooth progression of the working session. However, varying viewing angles and accumulated localization errors make it easy for robots to falsely detect changes in the surrounding world due to low observation overlap and drifted object associations. In this paper, based on the recently proposed category-level Neural Descriptor Fields (NDFs), we develop an object-level online change detection approach that is robust to partially overlapping observations and noisy localization results. Utilizing the shape completion capability and SE(3)-equivariance of NDFs, we represent objects with compact shape codes encoding full object shapes from partial observations. The objects are then organized in a spatial tree structure based on object centers recovered from NDFs for fast queries of object neighborhoods. By associating objects via shape code similarity and comparing local object-neighbor spatial layout, our proposed approach demonstrates robustness to low observation overlap and localization noises. We conduct experiments on both synthetic and real-world sequences and achieve improved change detection results compared to multiple baseline methods. Project webpage: https://yilundu.github.io/ndf_change