 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Hamiltonian Flow Maps: Mean Flow Consistency for Large-Timestep Molecular Dynamics
Jan 29, 2026Simulating the long-time evolution of Hamiltonian systems is limited by the small timesteps required for stable numerical integration. To overcome this constraint, we introduce a framework to learn Hamiltonian Flow Maps by predicting the mean phase-space evolution over a chosen time span $Δt$, enabling stable large-timestep updates far beyond the stability limits of classical integrators. To this end, we impose a Mean Flow consistency condition for time-averaged Hamiltonian dynamics. Unlike prior approaches, this allows training on independent phase-space samples without access to future states, avoiding expensive trajectory generation. Validated across diverse Hamiltonian systems, our method in particular improves upon molecular dynamics simulations using machine-learned force fields (MLFF). Our models maintain comparable training and inference cost, but support significantly larger integration timesteps while trained directly on widely-available trajectory-free MLFF datasets.
Optimal Sampling Density for Nonparametric Regression
May 25, 2021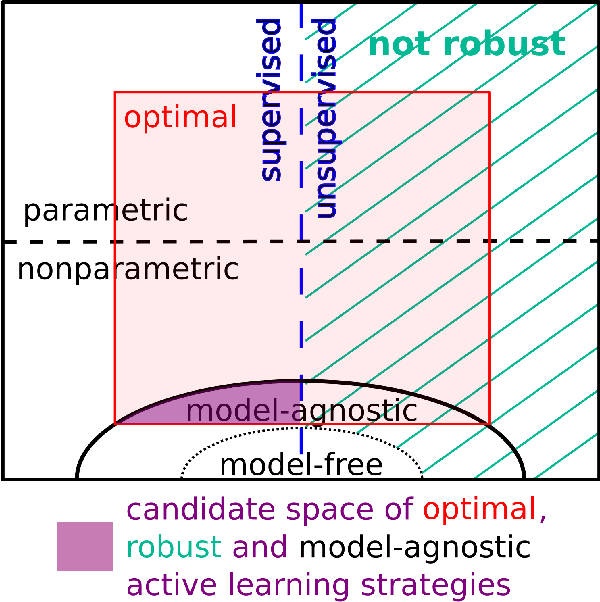
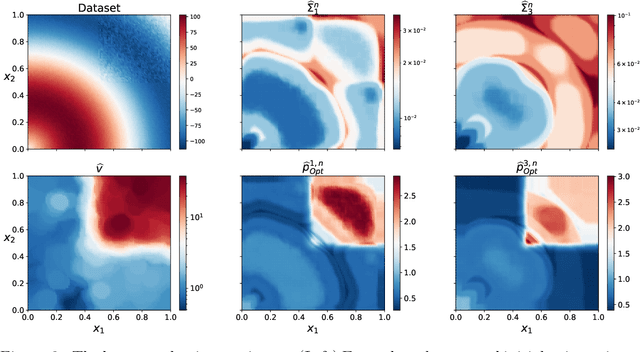
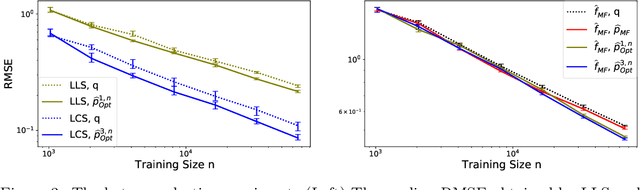
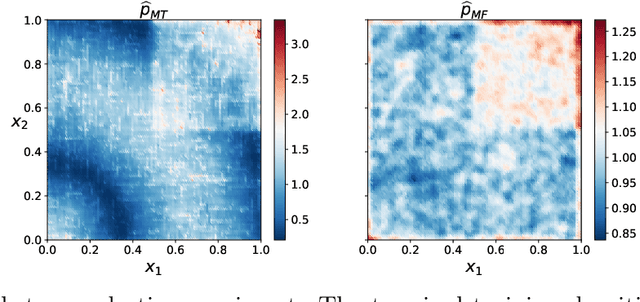
We propose a novel active learning strategy for regression, which is model-agnostic, robust against model mismatch, and interpretable. Assuming that a small number of initial samples are available, we derive the optimal training density that minimizes the generalization error of local polynomial smoothing (LPS) with its kernel bandwidth tuned locally: We adopt the mean integrated squared error (MISE) as a generalization criterion, and use the asymptotic behavior of the MISE as well as thelocally optimal bandwidths (LOB) -- the bandwidth function that minimizes MISE in the asymptotic limit. The asymptotic expression of our objective then reveals the dependence of the MISE on the training density, enabling analytic minimization. As a result, we obtain the optimal training density in a closed-form. The almost model-free nature of our approach should encode raw properties of the target problem, and thus provide a robust and model-agnostic active learning strategy. Furthermore, the obtained training density factorizes the influence of local function complexity, noise leveland test density in a transparent and interpretable way. We validate our theory in numerical simulations, and show that the proposed active learning method outperforms the existing state-of-the-art model-agnostic approaches.