 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Ego-Centric BEV Representations from a Perspective-Privileged View: Cross-View Supervision for Online HD Map Construction
May 12, 2026Bird's-eye-view (BEV) representations derived from multi-camera input have become a central interface for online high-definition (HD) map construction. However, most approaches rely solely on ego-centric supervision, requiring large-scale scene structure to be inferred from incomplete observations, occlusions, and diminishing information density at long range, where perspective effects and spatial sparsity hinder consistent structural reasoning. We introduce Cross-View Supervision (CVS), a representation learning paradigm that transfers geometric and topological priors from an ego-aligned overhead perspective into camera-based BEV encoders. Rather than adding auxiliary semantic losses, CVS aligns representations in a shared BEV feature space and distills globally consistent structural knowledge from a perspective-privileged teacher into the ego-centric backbone. This supervision enhances structural coherence without modifying the inference architecture or requiring overhead input at test time. Experiments on nuScenes using ego-aligned aerial imagery from the AID4AD cross-view extension demonstrate consistent improvements over StreamMapNet while maintaining identical camera-only inference. CVS yields +3.9\,mAP in the standard $60\times30\,\mathrm{m}$ region and +9.9\,mAP in the extended $100\times50\,\mathrm{m}$ setting, corresponding to a 44\% relative gain at long range. These results highlight perspective-privileged structural supervision as a promising training principle for improving BEV representation learning in HD map construction.
ROSA: Roundabout Optimized Speed Advisory with Multi-Agent Trajectory Prediction in Multimodal Traffic
Feb 16, 2026We present ROSA -- Roundabout Optimized Speed Advisory -- a system that combines multi-agent trajectory prediction with coordinated speed guidance for multimodal, mixed traffic at roundabouts. Using a Transformer-based model, ROSA jointly predicts the future trajectories of vehicles and Vulnerable Road Users (VRUs) at roundabouts. Trained for single-step prediction and deployed autoregressively, it generates deterministic outputs, enabling actionable speed advisories. Incorporating motion dynamics, the model achieves high accuracy (ADE: 1.29m, FDE: 2.99m at a five-second prediction horizon), surpassing prior work. Adding route intention further improves performance (ADE: 1.10m, FDE: 2.36m), demonstrating the value of connected vehicle data. Based on predicted conflicts with VRUs and circulating vehicles, ROSA provides real-time, proactive speed advisories for approaching and entering the roundabout. Despite prediction uncertainty, ROSA significantly improves vehicle efficiency and safety, with positive effects even on perceived safety from a VRU perspective. The source code of this work is available under: github.com/urbanAIthi/ROSA.
TUM2TWIN: Introducing the Large-Scale Multimodal Urban Digital Twin Benchmark Dataset
May 13, 2025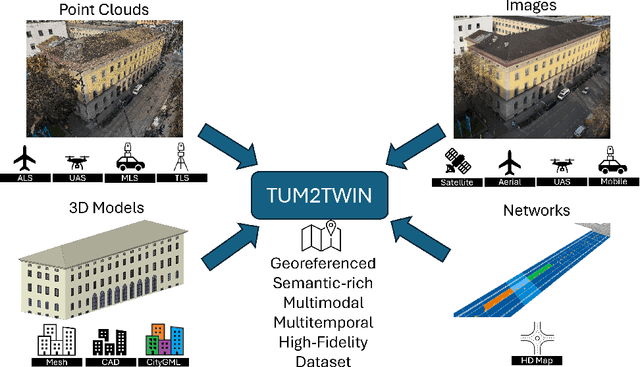
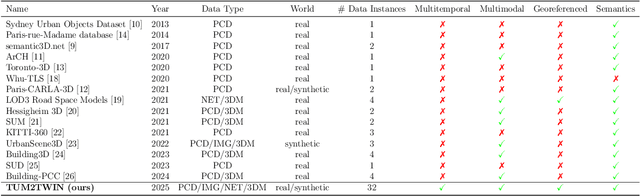
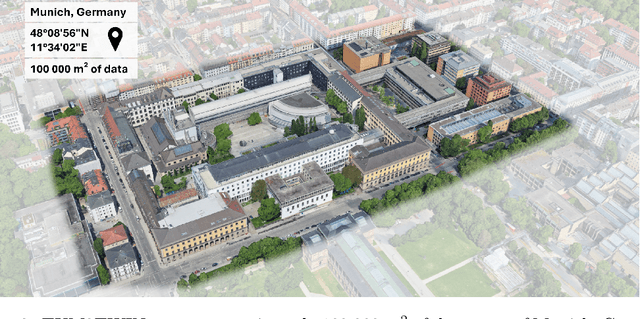
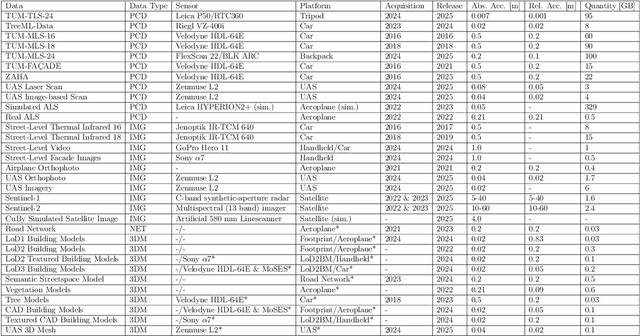
Urban Digital Twins (UDTs) have become essential for managing cities and integrating complex, heterogeneous data from diverse sources. Creating UDTs involves challenges at multiple process stages, including acquiring accurate 3D source data, reconstructing high-fidelity 3D models, maintaining models' updates, and ensuring seamless interoperability to downstream tasks. Current datasets are usually limited to one part of the processing chain, hampering comprehensive UDTs validation. To address these challenges, we introduce the first comprehensive multimodal Urban Digital Twin benchmark dataset: TUM2TWIN. This dataset includes georeferenced, semantically aligned 3D models and networks along with various terrestrial, mobile, aerial, and satellite observations boasting 32 data subsets over roughly 100,000 $m^2$ and currently 767 GB of data. By ensuring georeferenced indoor-outdoor acquisition, high accuracy, and multimodal data integration, the benchmark supports robust analysis of sensors and the development of advanced reconstruction methods. Additionally, we explore downstream tasks demonstrating the potential of TUM2TWIN, including novel view synthesis of NeRF and Gaussian Splatting, solar potential analysis, point cloud semantic segmentation, and LoD3 building reconstruction. We are convinced this contribution lays a foundation for overcoming current limitations in UDT creation, fostering new research directions and practical solutions for smarter, data-driven urban environments. The project is available under: https://tum2t.win
Floating Car Observers in Intelligent Transportation Systems: Detection Modeling and Temporal Insights
Apr 29, 2025Floating Car Observers (FCOs) extend traditional Floating Car Data (FCD) by integrating onboard sensors to detect and localize other traffic participants, providing richer and more detailed traffic data. In this work, we explore various modeling approaches for FCO detections within microscopic traffic simulations to evaluate their potential for Intelligent Transportation System (ITS) applications. These approaches range from 2D raytracing to high-fidelity co-simulations that emulate real-world sensors and integrate 3D object detection algorithms to closely replicate FCO detections. Additionally, we introduce a neural network-based emulation technique that effectively approximates the results of high-fidelity co-simulations. This approach captures the unique characteristics of FCO detections while offering a fast and scalable solution for modeling. Using this emulation method, we investigate the impact of FCO data in a digital twin of a traffic network modeled in SUMO. Results demonstrate that even at a 20% penetration rate, FCOs using LiDAR-based detections can identify 65% of vehicles across various intersections and traffic demand scenarios. Further potential emerges when temporal insights are integrated, enabling the recovery of previously detected but currently unseen vehicles. By employing data-driven methods, we recover over 80% of these vehicles with minimal positional deviations. These findings underscore the potential of FCOs for ITS, particularly in enhancing traffic state estimation and monitoring under varying penetration rates and traffic conditions.
Multi-Task Lane-Free Driving Strategy for Connected and Automated Vehicles: A Multi-Agent Deep Reinforcement Learning Approach
Jun 20, 2024Deep reinforcement learning has shown promise in various engineering applications, including vehicular traffic control. The non-stationary nature of traffic, especially in the lane-free environment with more degrees of freedom in vehicle behaviors, poses challenges for decision-making since a wrong action might lead to a catastrophic failure. In this paper, we propose a novel driving strategy for Connected and Automated Vehicles (CAVs) based on a competitive Multi-Agent Deep Deterministic Policy Gradient approach. The developed multi-agent deep reinforcement learning algorithm creates a dynamic and non-stationary scenario, mirroring real-world traffic complexities and making trained agents more robust. The algorithm's reward function is strategically and uniquely formulated to cover multiple vehicle control tasks, including maintaining desired speeds, overtaking, collision avoidance, and merging and diverging maneuvers. Moreover, additional considerations for both lateral and longitudinal passenger comfort and safety criteria are taken into account. We employed inter-vehicle forces, known as nudging and repulsive forces, to manage the maneuvers of CAVs in a lane-free traffic environment. The proposed driving algorithm is trained and evaluated on lane-free roads using the Simulation of Urban Mobility platform. Experimental results demonstrate the algorithm's efficacy in handling different objectives, highlighting its potential to enhance safety and efficiency in autonomous driving within lane-free traffic environments.
Temporal Enhanced Floating Car Observers
Mar 06, 2024Floating Car Observers (FCOs) are an innovative method to collect traffic data by deploying sensor-equipped vehicles to detect and locate other vehicles. We demonstrate that even a small penetration rate of FCOs can identify a significant amount of vehicles at a given intersection. This is achieved through the emulation of detection within a microscopic traffic simulation. Additionally, leveraging data from previous moments can enhance the detection of vehicles in the current frame. Our findings indicate that, with a 20-second observation window, it is possible to recover up to 20\% of vehicles that are not visible by FCOs in the current timestep. To exploit this, we developed a data-driven strategy, utilizing sequences of Bird's Eye View (BEV) representations of detected vehicles and deep learning models. This approach aims to bring currently undetected vehicles into view in the present moment, enhancing the currently detected vehicles. Results of different spatiotemporal architectures show that up to 41\% of the vehicles can be recovered into the current timestep at their current position. This enhancement enriches the information initially available by the FCO, allowing an improved estimation of traffic states and metrics (e.g. density and queue length) for improved implementation of traffic management strategies.
Unlocking Past Information: Temporal Embeddings in Cooperative Bird's Eye View Prediction
Jan 25, 2024Accurate and comprehensive semantic segmentation of Bird's Eye View (BEV) is essential for ensuring safe and proactive navigation in autonomous driving. Although cooperative perception has exceeded the detection capabilities of single-agent systems, prevalent camera-based algorithms in cooperative perception neglect valuable information derived from historical observations. This limitation becomes critical during sensor failures or communication issues as cooperative perception reverts to single-agent perception, leading to degraded performance and incomplete BEV segmentation maps. This paper introduces TempCoBEV, a temporal module designed to incorporate historical cues into current observations, thereby improving the quality and reliability of BEV map segmentations. We propose an importance-guided attention architecture to effectively integrate temporal information that prioritizes relevant properties for BEV map segmentation. TempCoBEV is an independent temporal module that seamlessly integrates into state-of-the-art camera-based cooperative perception models. We demonstrate through extensive experiments on the OPV2V dataset that TempCoBEV performs better than non-temporal models in predicting current and future BEV map segmentations, particularly in scenarios involving communication failures. We show the efficacy of TempCoBEV and its capability to integrate historical cues into the current BEV map, improving predictions under optimal communication conditions by up to 2% and under communication failures by up to 19%. The code will be published on GitHub.
Autonomous Vehicles as a Sensor: Simulating Data Collection Process
Aug 31, 2023



Urban traffic state estimation is pivotal in furnishing precise and reliable insights into traffic flow characteristics, thereby enabling efficient traffic management. Traditional traffic estimation methodologies have predominantly hinged on labor-intensive and costly techniques such as loop detectors and floating car data. Nevertheless, the relentless progression in autonomous driving technology has catalyzed an increasing interest in capitalizing on the extensive potential of on-board sensor data, giving rise to a novel concept known as "Autonomous Vehicles as a Sensor" (AVaaS). This paper innovatively refines the AVaaS concept by simulating the data collection process. We take real-world sensor attributes into account and employ more accurate estimation techniques based on the on-board sensor data. Such data can facilitate the estimation of high-resolution, link-level traffic states and, more extensively, online cluster- and network-level traffic states. We substantiate the viability of the AVaaS concept through a case study conducted using a real-world traffic simulation in Ingolstadt, Germany. The results attest to the ability of AVaaS in estimating both microscopic (link-level) and macroscopic (cluster- and network-level) traffic states, thereby highlighting the immense potential of the AVaaS concept in effecting precise and reliable traffic state estimation and also further applications.
Multi-Sensor Data Fusion for Accurate Traffic Speed and Travel Time Reconstruction
May 08, 2021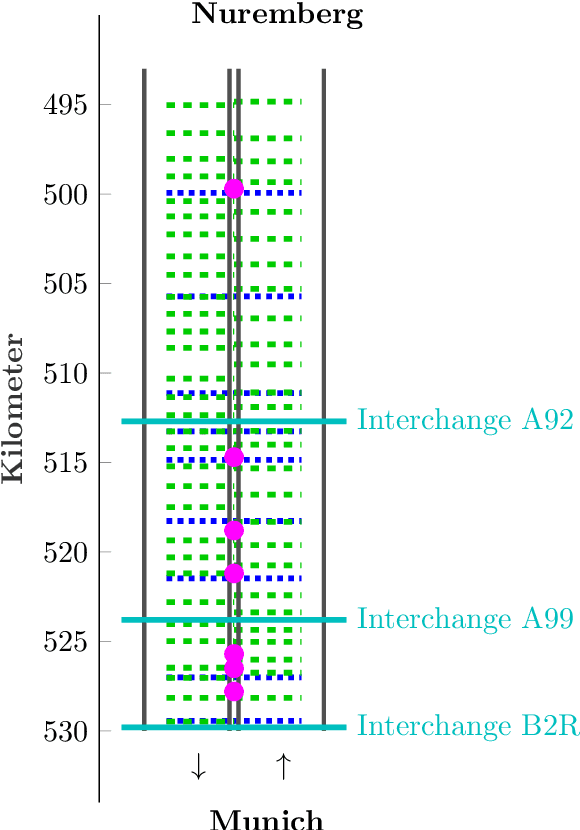
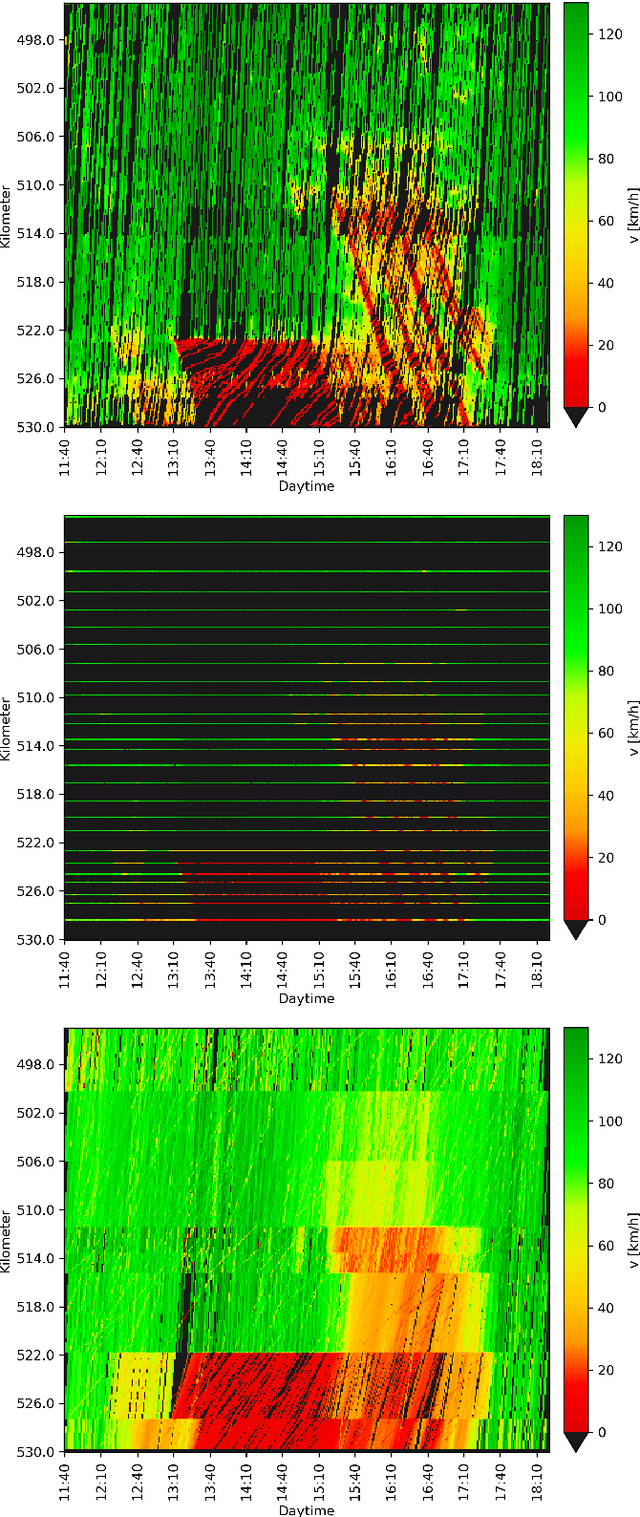
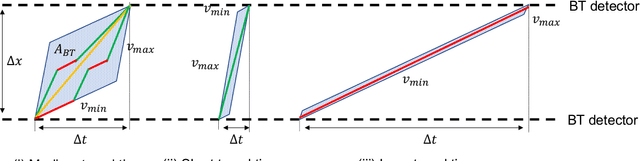
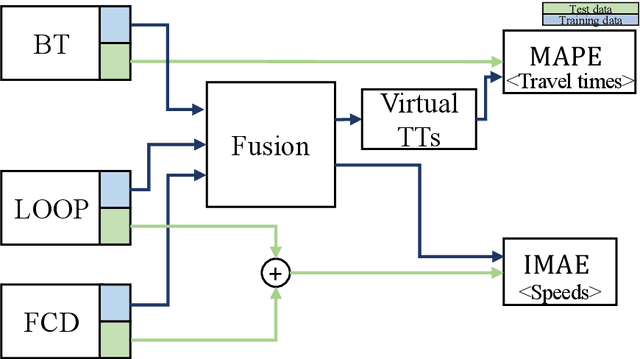
This paper studies the joint reconstruction of traffic speeds and travel times by fusing sparse sensor data. Raw speed data from inductive loop detectors and floating cars as well as travel time measurements are combined using different fusion techniques. A novel fusion approach is developed which extends existing speed reconstruction methods to integrate low-resolution travel time data. Several state-of-the-art methods and the novel approach are evaluated on their performance in reconstructing traffic speeds and travel times using various combinations of sensor data. Algorithms and sensor setups are evaluated with real loop detector, floating car and Bluetooth data collected during severe congestion on German freeway A9. Two main aspects are examined: (i) which algorithm provides the most accurate result depending on the used data and (ii) which type of sensor and which combination of sensors yields higher estimation accuracies. Results show that, overall, the novel approach applied to a combination of floating-car data and loop data provides the best speed and travel time accuracy. Furthermore, a fusion of sources improves the reconstruction quality in many, but not all cases. In particular, Bluetooth data only provide a benefit for reconstruction purposes if integrated distinctively.
Estimating Traffic Speeds using Probe Data: A Deep Neural Network Approach
Apr 19, 2021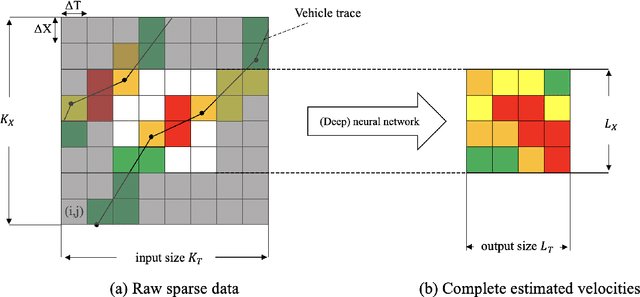
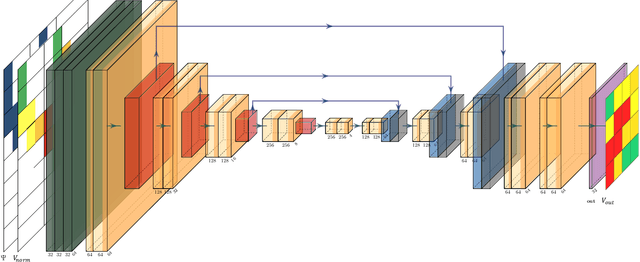
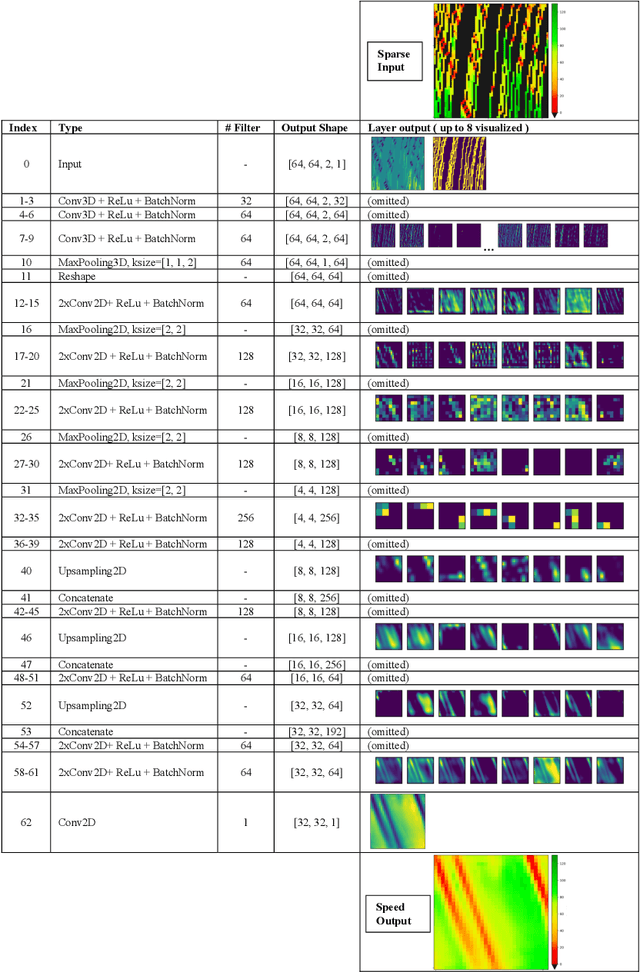

This paper presents a dedicated Deep Neural Network (DNN) architecture that reconstructs space-time traffic speeds on freeways given sparse data. The DNN is constructed in such a way, that it learns heterogeneous congestion patterns using a large dataset of sparse speed data, in particular from probe vehicles. Input to the DNN are two equally sized input matrices: one containing raw measurement data, and the other indicates the cells occupied with data. The DNN, comprising multiple stacked convolutional layers with an encoding-decoding structure and feed-forward paths, transforms the input into a full matrix of traffic speeds. The proposed DNN architecture is evaluated with respect to its ability to accurately reconstruct heterogeneous congestion patterns under varying input data sparsity. Therefore, a large set of empirical Floating-Car Data (FCD) collected on German freeway A9 during two months is utilized. In total, 43 congestion distinct scenarios are observed which comprise moving and stationary congestion patterns. A data augmentation technique is applied to generate input-output samples of the data, which makes the DNN shift-invariant as well as capable of managing varying data sparsities. The DNN is trained and subsequently applied to sparse data of an unseen congestion scenario. The results show that the DNN is able to apply learned patterns, and reconstructs moving as well as stationary congested traffic with high accuracy; even given highly sparse input data. Reconstructed speeds are compared qualitatively and quantitatively with the results of several state-of-the-art methods such as the Adaptive Smoothing Method (ASM), the Phase-Based Smoothing Method (PSM) and a standard Convolutional Neural Network (CNN) architecture. As a result, the DNN outperforms the other methods significantly.