 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Sensor Data Fusion for Accurate Traffic Speed and Travel Time Reconstruction
Paper and Code
May 08, 2021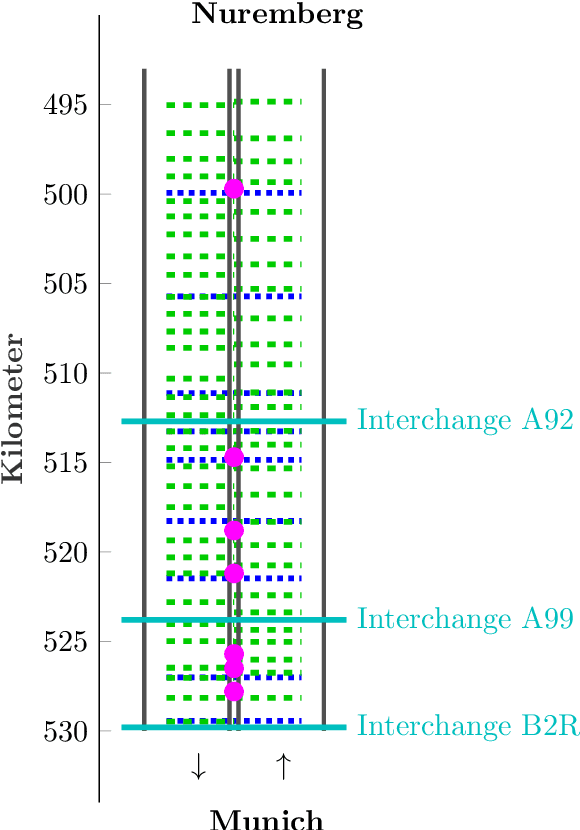
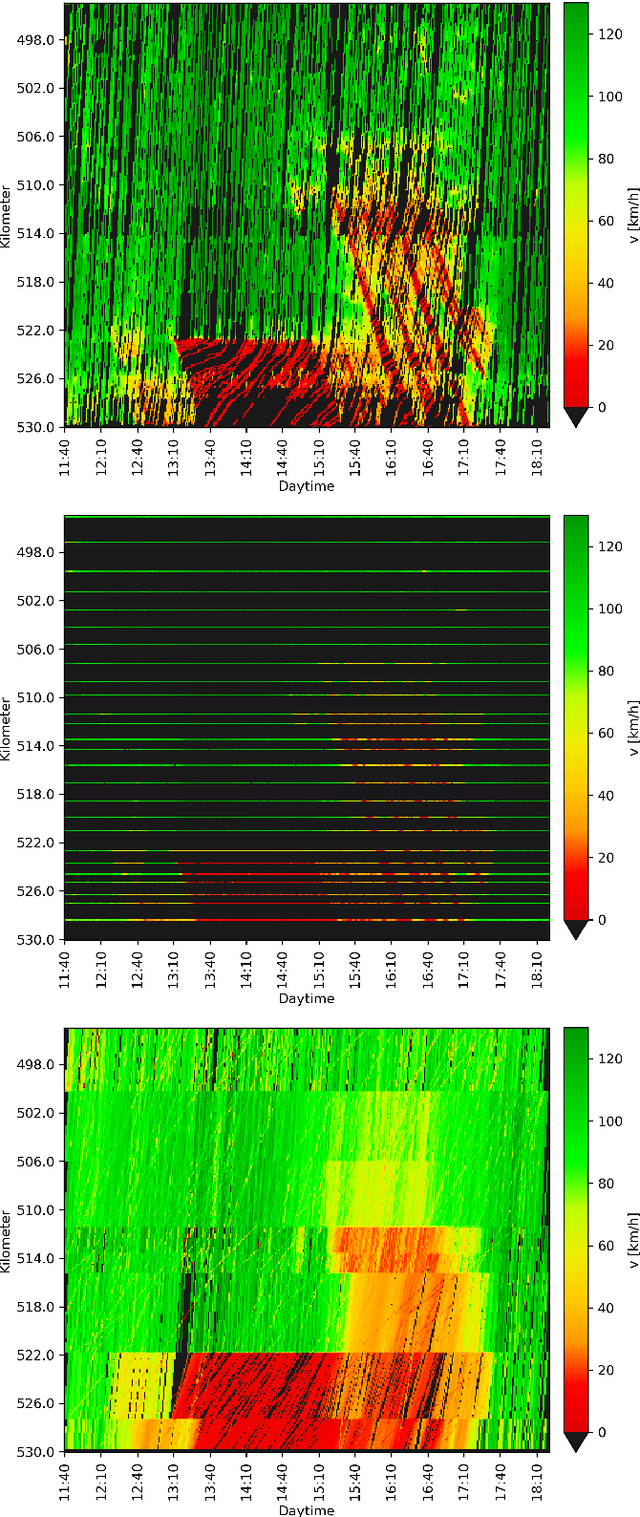
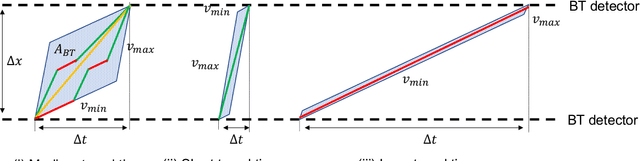
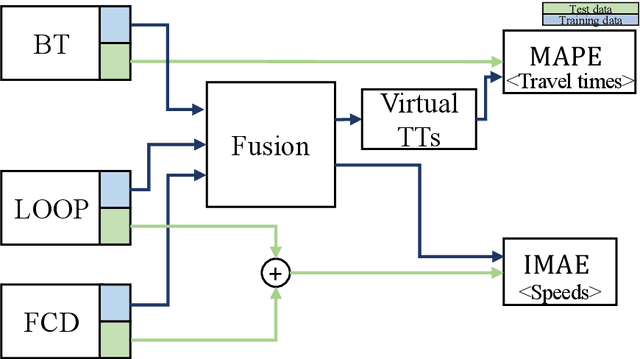
This paper studies the joint reconstruction of traffic speeds and travel times by fusing sparse sensor data. Raw speed data from inductive loop detectors and floating cars as well as travel time measurements are combined using different fusion techniques. A novel fusion approach is developed which extends existing speed reconstruction methods to integrate low-resolution travel time data. Several state-of-the-art methods and the novel approach are evaluated on their performance in reconstructing traffic speeds and travel times using various combinations of sensor data. Algorithms and sensor setups are evaluated with real loop detector, floating car and Bluetooth data collected during severe congestion on German freeway A9. Two main aspects are examined: (i) which algorithm provides the most accurate result depending on the used data and (ii) which type of sensor and which combination of sensors yields higher estimation accuracies. Results show that, overall, the novel approach applied to a combination of floating-car data and loop data provides the best speed and travel time accuracy. Furthermore, a fusion of sources improves the reconstruction quality in many, but not all cases. In particular, Bluetooth data only provide a benefit for reconstruction purposes if integrated distinctively.