 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCascade IPG Observer for Underwater Robot State Estimation
Apr 21, 2025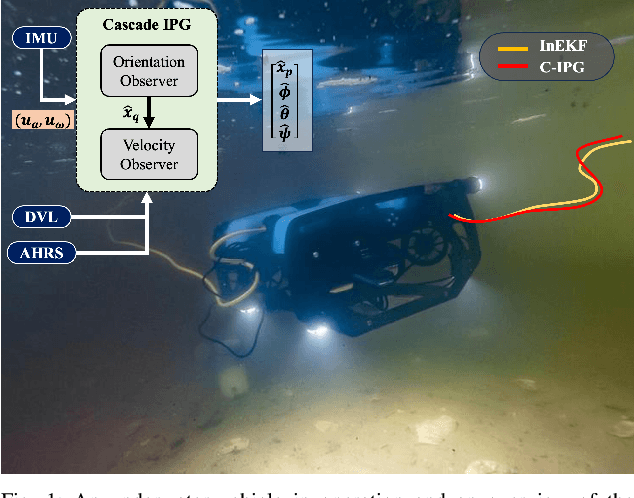
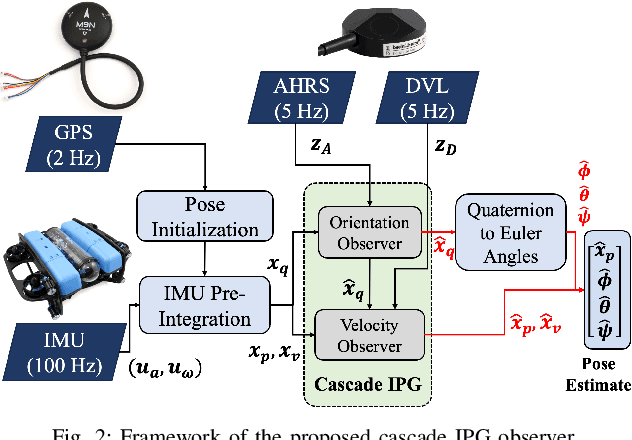
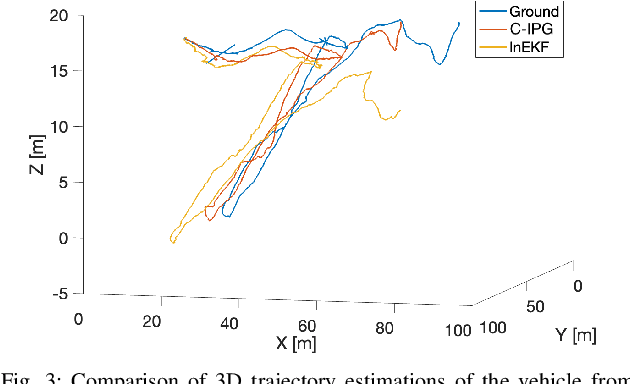

This paper presents a novel cascade nonlinear observer framework for inertial state estimation. It tackles the problem of intermediate state estimation when external localization is unavailable or in the event of a sensor outage. The proposed observer comprises two nonlinear observers based on a recently developed iteratively preconditioned gradient descent (IPG) algorithm. It takes the inputs via an IMU preintegration model where the first observer is a quaternion-based IPG. The output for the first observer is the input for the second observer, estimating the velocity and, consequently, the position. The proposed observer is validated on a public underwater dataset and a real-world experiment using our robot platform. The estimation is compared with an extended Kalman filter (EKF) and an invariant extended Kalman filter (InEKF). Results demonstrate that our method outperforms these methods regarding better positional accuracy and lower variance.
3D Water Quality Mapping using Invariant Extended Kalman Filtering for Underwater Robot Localization
Sep 17, 2024Water quality mapping for critical parameters such as temperature, salinity, and turbidity is crucial for assessing an aquaculture farm's health and yield capacity. Traditional approaches involve using boats or human divers, which are time-constrained and lack depth variability. This work presents an innovative approach to 3D water quality mapping in shallow water environments using a BlueROV2 equipped with GPS and a water quality sensor. This system allows for accurate location correction by resurfacing when errors occur. This study is being conducted at an oyster farm in the Chesapeake Bay, USA, providing a more comprehensive and precise water quality analysis in aquaculture settings.
UIVNAV: Underwater Information-driven Vision-based Navigation via Imitation Learning
Sep 15, 2023Autonomous navigation in the underwater environment is challenging due to limited visibility, dynamic changes, and the lack of a cost-efficient accurate localization system. We introduce UIVNav, a novel end-to-end underwater navigation solution designed to drive robots over Objects of Interest (OOI) while avoiding obstacles, without relying on localization. UIVNav uses imitation learning and is inspired by the navigation strategies used by human divers who do not rely on localization. UIVNav consists of the following phases: (1) generating an intermediate representation (IR), and (2) training the navigation policy based on human-labeled IR. By training the navigation policy on IR instead of raw data, the second phase is domain-invariant -- the navigation policy does not need to be retrained if the domain or the OOI changes. We show this by deploying the same navigation policy for surveying two different OOIs, oyster and rock reefs, in two different domains, simulation, and a real pool. We compared our method with complete coverage and random walk methods which showed that our method is more efficient in gathering information for OOIs while also avoiding obstacles. The results show that UIVNav chooses to visit the areas with larger area sizes of oysters or rocks with no prior information about the environment or localization. Moreover, a robot using UIVNav compared to complete coverage method surveys on average 36% more oysters when traveling the same distances. We also demonstrate the feasibility of real-time deployment of UIVNavin pool experiments with BlueROV underwater robot for surveying a bed of oyster shells.
AppStreamer: Reducing Storage Requirements of Mobile Games through Predictive Streaming
Dec 16, 2019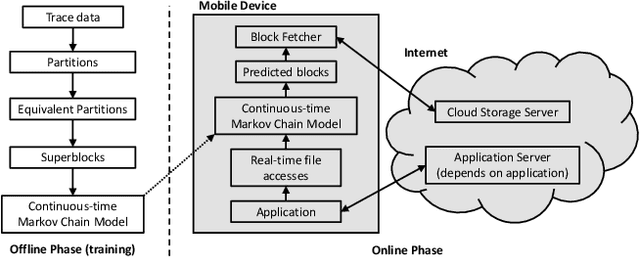
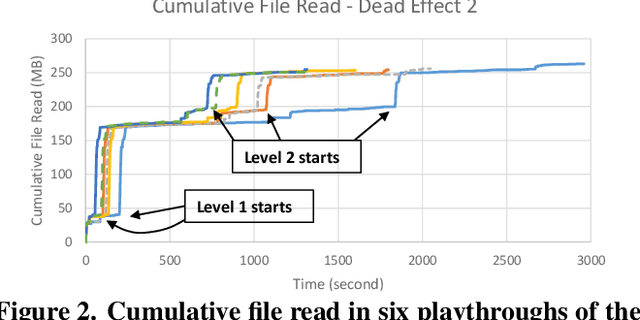
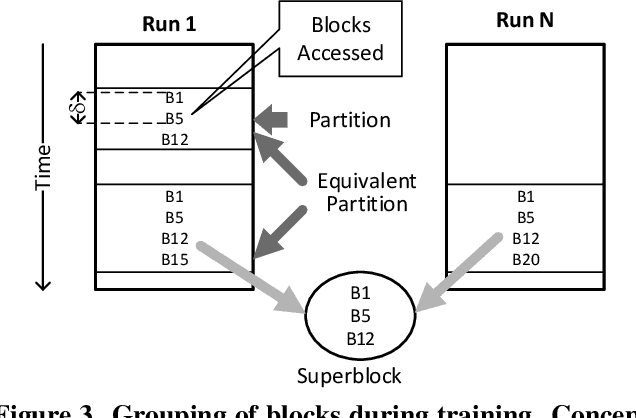
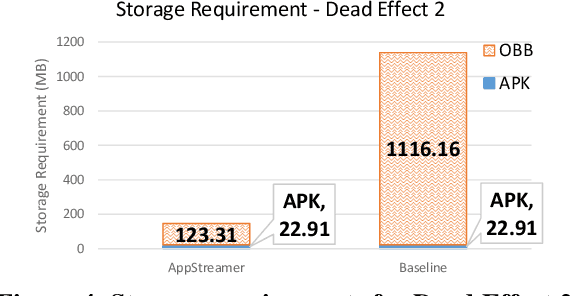
Storage has become a constrained resource on smartphones. Gaming is a popular activity on mobile devices and the explosive growth in the number of games coupled with their growing size contributes to the storage crunch. Even where storage is plentiful, it takes a long time to download and install a heavy app before it can be launched. This paper presents AppStreamer, a novel technique for reducing the storage requirements or startup delay of mobile games, and heavy mobile apps in general. AppStreamer is based on the intuition that most apps do not need the entirety of its files (images, audio and video clips, etc.) at any one time. AppStreamer can, therefore, keep only a small part of the files on the device, akin to a "cache", and download the remainder from a cloud storage server or a nearby edge server when it predicts that the app will need them in the near future. AppStreamer continuously predicts file blocks for the near future as the user uses the app, and fetches them from the storage server before the user sees a stall due to missing resources. We implement AppStreamer at the Android file system layer. This ensures that the apps require no source code or modification, and the approach generalizes across apps. We evaluate AppStreamer using two popular games: Dead Effect 2, a 3D first-person shooter, and Fire Emblem Heroes, a 2D turn-based strategy role-playing game. Through a user study, 75% and 87% of the users respectively find that AppStreamer provides the same quality of user experience as the baseline where all files are stored on the device. AppStreamer cuts down the storage requirement by 87% for Dead Effect 2 and 86% for Fire Emblem Heroes.