 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmoothing and Mapping using Multiple Robots
May 06, 2018
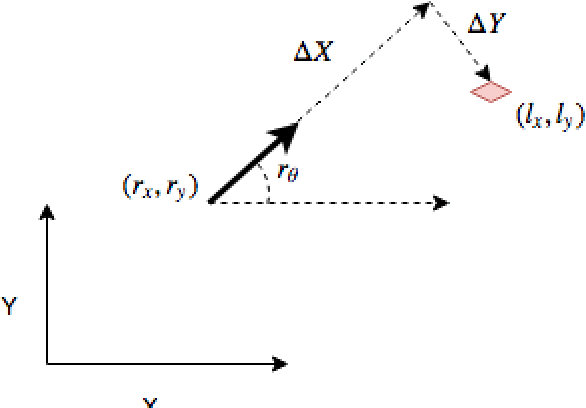

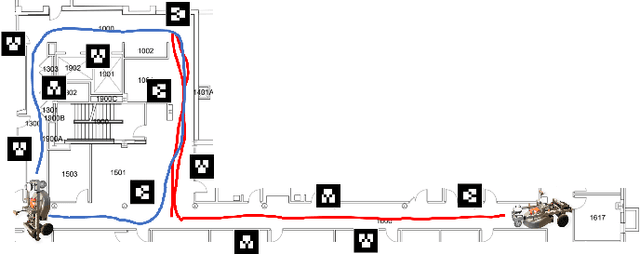
Mapping expansive regions is an arduous and often times incomplete when performed by a single agent. In this paper we illustrate an extension of \texttt{Full SLAM} \cite{Dellaert06ijrr} and \cite{dong}, which ensures smooth maps with loop-closure for multi-robot settings. The current development and the associated mathematical formulation ensure without loss of generality the applicability of full bundle adjustment approach for multiple robots operating in relatively static environments. We illustrate the efficacy of this system by presenting relevant results from experiments performed in an indoor setting. In addition to end-to-end description of the pipeline for performing smoothing and mapping \texttt{SAM} with a fleet of robots, we discuss a one-time prior estimation technique that ensures the incremental concatenation of measurements from respective robots in order to generate one smooth global map - thus emulating large scale mapping with single robot. Along with an interpretation of the non-linear estimates, we present necessary implementation details for adopting this SAM system.
Adaptive Performance Assessment For Drivers Through Behavioral Advantage
Apr 26, 2018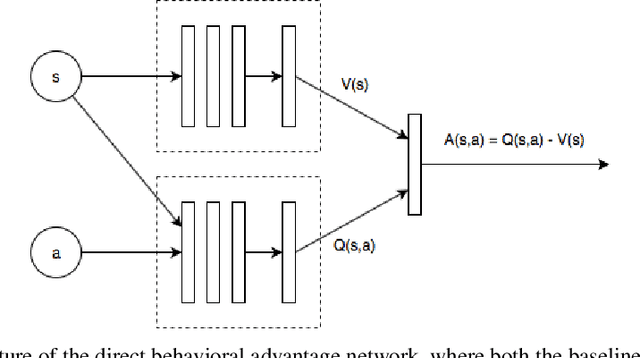
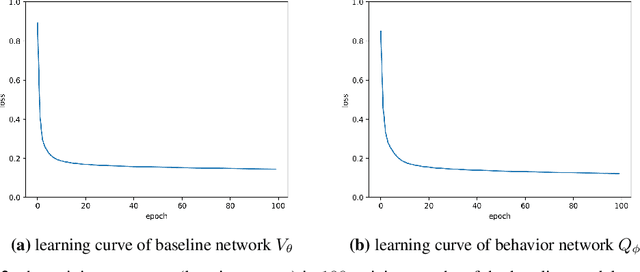
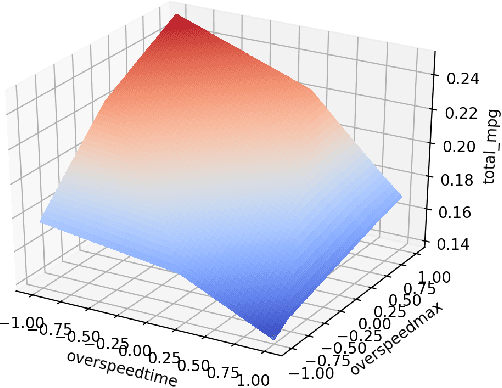
The potential positive impact of autonomous driving and driver assistance technolo- gies have been a major impetus over the last decade. On the flip side, it has been a challenging problem to analyze the performance of human drivers or autonomous driving agents quantitatively. In this work, we propose a generic method that compares the performance of drivers or autonomous driving agents even if the environmental conditions are different, by using the driver behavioral advantage instead of absolute metrics, which efficiently removes the environmental factors. A concrete application of the method is also presented, where the performance of more than 100 truck drivers was evaluated and ranked in terms of fuel efficiency, covering more than 90,000 trips spanning an average of 300 miles in a variety of driving conditions and environments.
On Optimizing Human-Machine Task Assignments
Sep 24, 2015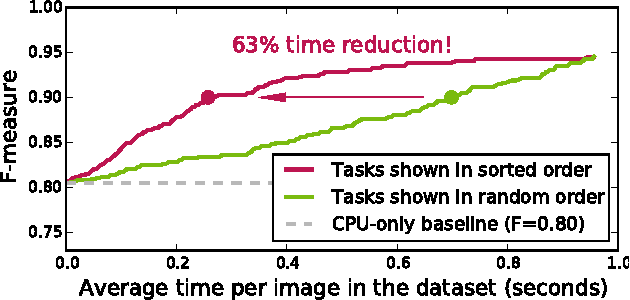
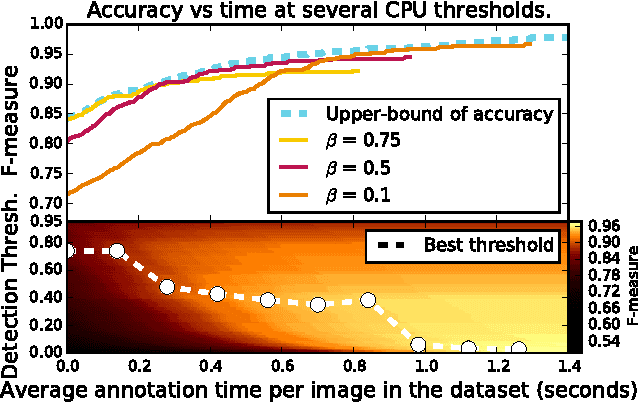
When crowdsourcing systems are used in combination with machine inference systems in the real world, they benefit the most when the machine system is deeply integrated with the crowd workers. However, if researchers wish to integrate the crowd with "off-the-shelf" machine classifiers, this deep integration is not always possible. This work explores two strategies to increase accuracy and decrease cost under this setting. First, we show that reordering tasks presented to the human can create a significant accuracy improvement. Further, we show that greedily choosing parameters to maximize machine accuracy is sub-optimal, and joint optimization of the combined system improves performance.