 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTruncFormer: Private LLM Inference Using Only Truncations
Dec 02, 2024

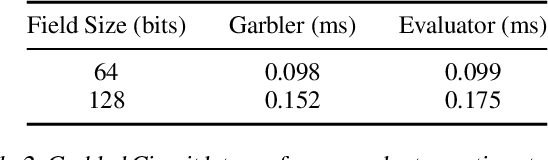
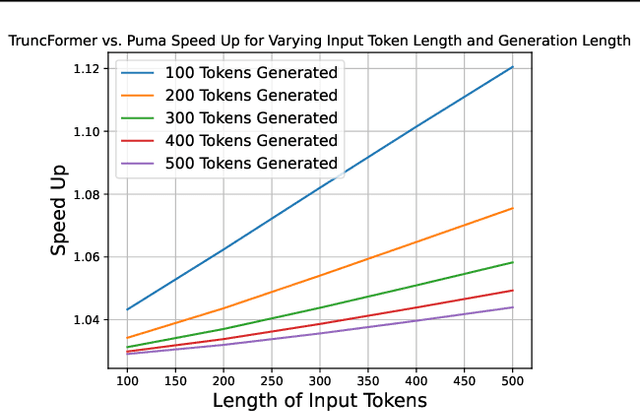
Private inference (PI) serves an important role in guaranteeing the privacy of user data when interfacing with proprietary machine learning models such as LLMs. However, PI remains practically intractable due to the massive latency costs associated with nonlinear functions present in LLMs. Existing works have focused on improving latency of specific LLM nonlinearities (such as the Softmax, or the GeLU) via approximations. However, new types of nonlinearities are regularly introduced with new LLM architectures, and this has led to a constant game of catch-up where PI researchers attempt to optimize the newest nonlinear function. We introduce TruncFormer, a framework for taking any LLM and transforming it into a plaintext emulation of PI. Our framework leverages the fact that nonlinearities in LLMs are differentiable and can be accurately approximated with a sequence of additions, multiplications, and truncations. Further, we decouple the add/multiply and truncation operations, and statically determine where truncations should be inserted based on a given field size and input representation size. This leads to latency improvements over existing cryptographic protocols that enforce truncation after every multiplication operation. We open source our code for community use.
Towards Fast and Scalable Private Inference
Jul 09, 2023
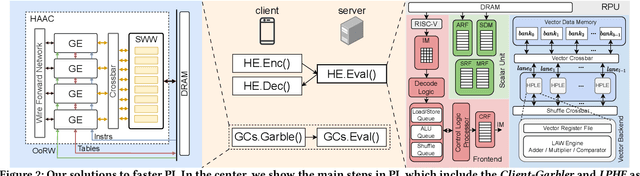
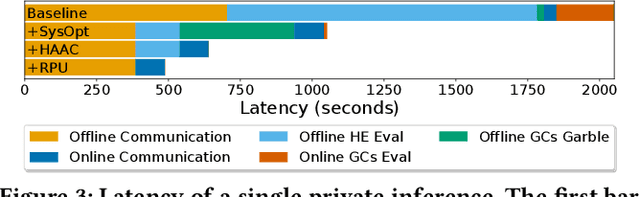
Privacy and security have rapidly emerged as first order design constraints. Users now demand more protection over who can see their data (confidentiality) as well as how it is used (control). Here, existing cryptographic techniques for security fall short: they secure data when stored or communicated but must decrypt it for computation. Fortunately, a new paradigm of computing exists, which we refer to as privacy-preserving computation (PPC). Emerging PPC technologies can be leveraged for secure outsourced computation or to enable two parties to compute without revealing either users' secret data. Despite their phenomenal potential to revolutionize user protection in the digital age, the realization has been limited due to exorbitant computational, communication, and storage overheads. This paper reviews recent efforts on addressing various PPC overheads using private inference (PI) in neural network as a motivating application. First, the problem and various technologies, including homomorphic encryption (HE), secret sharing (SS), garbled circuits (GCs), and oblivious transfer (OT), are introduced. Next, a characterization of their overheads when used to implement PI is covered. The characterization motivates the need for both GCs and HE accelerators. Then two solutions are presented: HAAC for accelerating GCs and RPU for accelerating HE. To conclude, results and effects are shown with a discussion on what future work is needed to overcome the remaining overheads of PI.
Sisyphus: A Cautionary Tale of Using Low-Degree Polynomial Activations in Privacy-Preserving Deep Learning
Jul 26, 2021
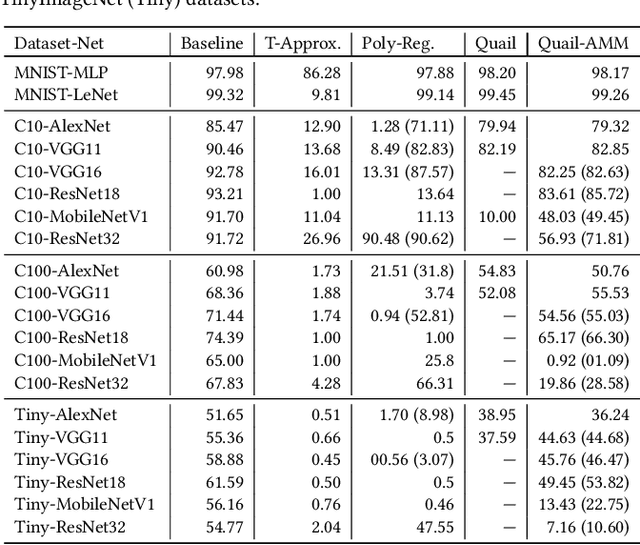
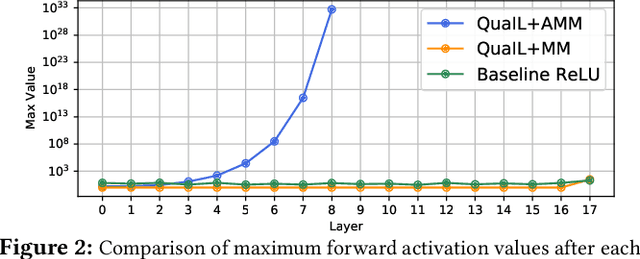
Privacy concerns in client-server machine learning have given rise to private inference (PI), where neural inference occurs directly on encrypted inputs. PI protects clients' personal data and the server's intellectual property. A common practice in PI is to use garbled circuits to compute nonlinear functions privately, namely ReLUs. However, garbled circuits suffer from high storage, bandwidth, and latency costs. To mitigate these issues, PI-friendly polynomial activation functions have been employed to replace ReLU. In this work, we ask: Is it feasible to substitute all ReLUs with low-degree polynomial activation functions for building deep, privacy-friendly neural networks? We explore this question by analyzing the challenges of substituting ReLUs with polynomials, starting with simple drop-and-replace solutions to novel, more involved replace-and-retrain strategies. We examine the limitations of each method and provide commentary on the use of polynomial activation functions for PI. We find all evaluated solutions suffer from the escaping activation problem: forward activation values inevitably begin to expand at an exponential rate away from stable regions of the polynomials, which leads to exploding values (NaNs) or poor approximations.
Attacking Vision-based Perception in End-to-End Autonomous Driving Models
Oct 02, 2019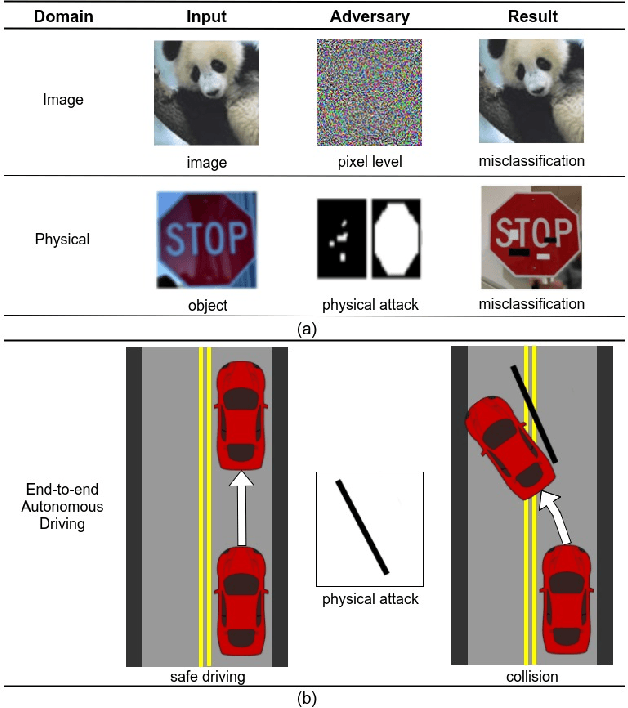
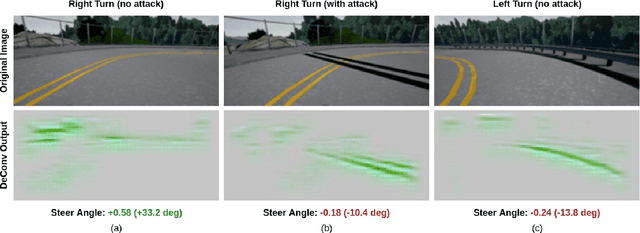
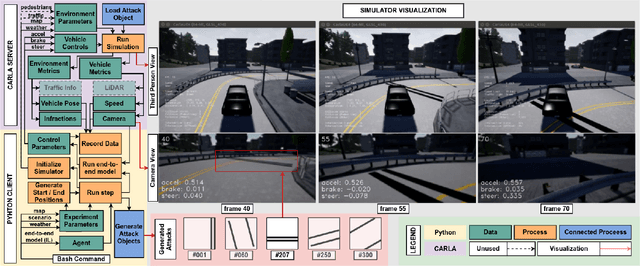
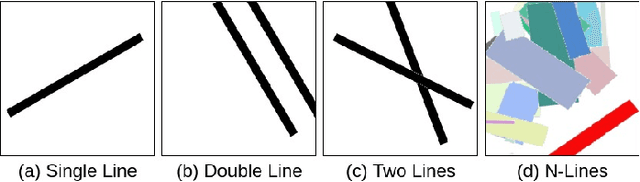
Recent advances in machine learning, especially techniques such as deep neural networks, are enabling a range of emerging applications. One such example is autonomous driving, which often relies on deep learning for perception. However, deep learning-based perception has been shown to be vulnerable to a host of subtle adversarial manipulations of images. Nevertheless, the vast majority of such demonstrations focus on perception that is disembodied from end-to-end control. We present novel end-to-end attacks on autonomous driving in simulation, using simple physically realizable attacks: the painting of black lines on the road. These attacks target deep neural network models for end-to-end autonomous driving control. A systematic investigation shows that such attacks are easy to engineer, and we describe scenarios (e.g., right turns) in which they are highly effective. We define several objective functions that quantify the success of an attack and develop techniques based on Bayesian Optimization to efficiently traverse the search space of higher dimensional attacks. Additionally, we define a novel class of hijacking attacks, where painted lines on the road cause the driver-less car to follow a target path. Through the use of network deconvolution, we provide insights into the successful attacks, which appear to work by mimicking activations of entirely different scenarios. Our code is available at https://github.com/xz-group/AdverseDrive