 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Federated Learning with Spike Neural Networks for Traffic Sign Recognition
May 28, 2022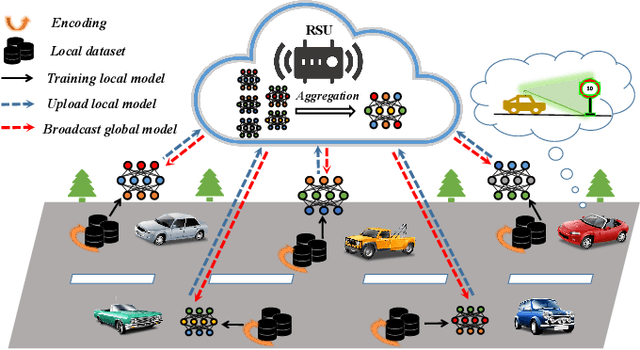
With the gradual popularization of self-driving, it is becoming increasingly important for vehicles to smartly make the right driving decisions and autonomously obey traffic rules by correctly recognizing traffic signs. However, for machine learning-based traffic sign recognition on the Internet of Vehicles (IoV), a large amount of traffic sign data from distributed vehicles is needed to be gathered in a centralized server for model training, which brings serious privacy leakage risk because of traffic sign data containing lots of location privacy information. To address this issue, we first exploit privacy-preserving federated learning to perform collaborative training for accurate recognition models without sharing raw traffic sign data. Nevertheless, due to the limited computing and energy resources of most devices, it is hard for vehicles to continuously undertake complex artificial intelligence tasks. Therefore, we introduce powerful Spike Neural Networks (SNNs) into traffic sign recognition for energy-efficient and fast model training, which is the next generation of neural networks and is practical and well-fitted to IoV scenarios. Furthermore, we design a novel encoding scheme for SNNs based on neuron receptive fields to extract information from the pixel and spatial dimensions of traffic signs to achieve high-accuracy training. Numerical results indicate that the proposed federated SNN outperforms traditional federated convolutional neural networks in terms of accuracy, noise immunity, and energy efficiency as well.
FedParking: A Federated Learning based Parking Space Estimation with Parked Vehicle assisted Edge Computing
Oct 19, 2021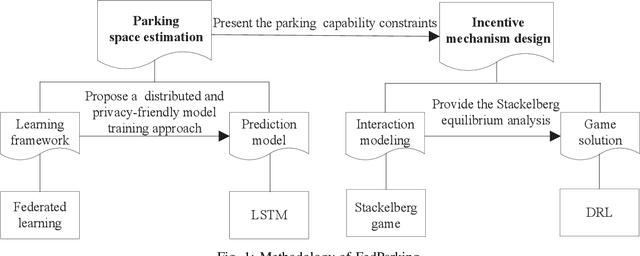
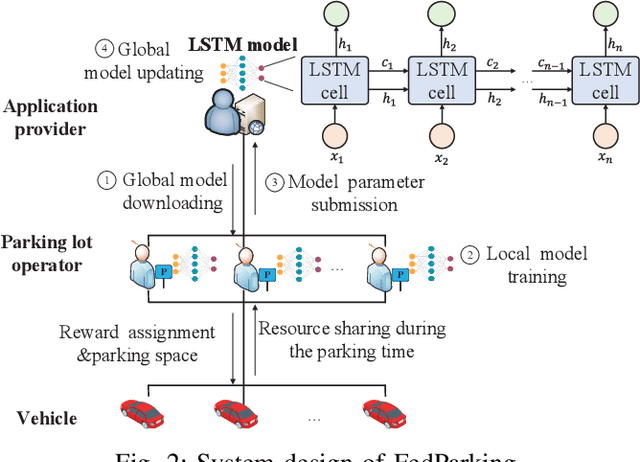
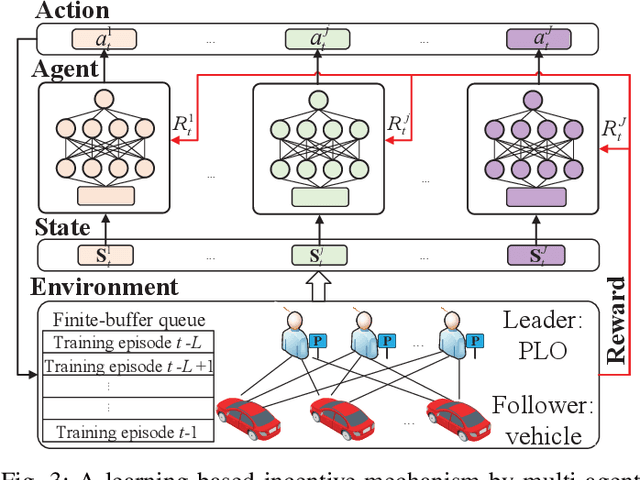
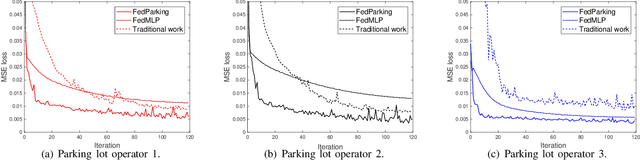
As a distributed learning approach, federated learning trains a shared learning model over distributed datasets while preserving the training data privacy. We extend the application of federated learning to parking management and introduce FedParking in which Parking Lot Operators (PLOs) collaborate to train a long short-term memory model for parking space estimation without exchanging the raw data. Furthermore, we investigate the management of Parked Vehicle assisted Edge Computing (PVEC) by FedParking. In PVEC, different PLOs recruit PVs as edge computing nodes for offloading services through an incentive mechanism, which is designed according to the computation demand and parking capacity constraints derived from FedParking. We formulate the interactions among the PLOs and vehicles as a multi-lead multi-follower Stackelberg game. Considering the dynamic arrivals of the vehicles and time-varying parking capacity constraints, we present a multi-agent deep reinforcement learning approach to gradually reach the Stackelberg equilibrium in a distributed yet privacy-preserving manner. Finally, numerical results are provided to demonstrate the effectiveness and efficiency of our scheme.
Deep Approximately Orthogonal Nonnegative Matrix Factorization for Clustering
Nov 20, 2017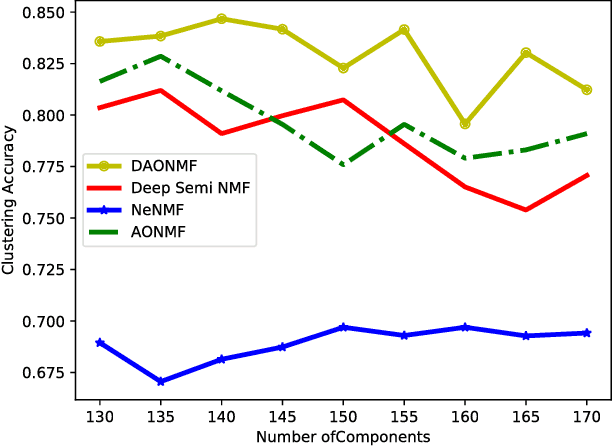
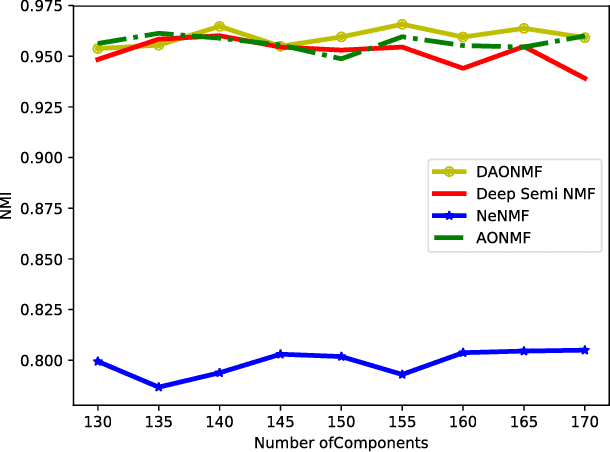
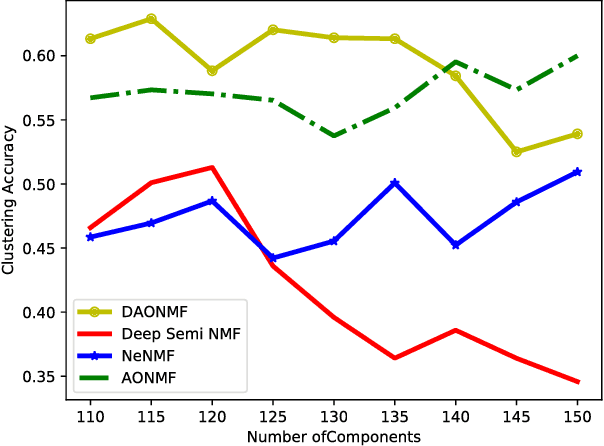
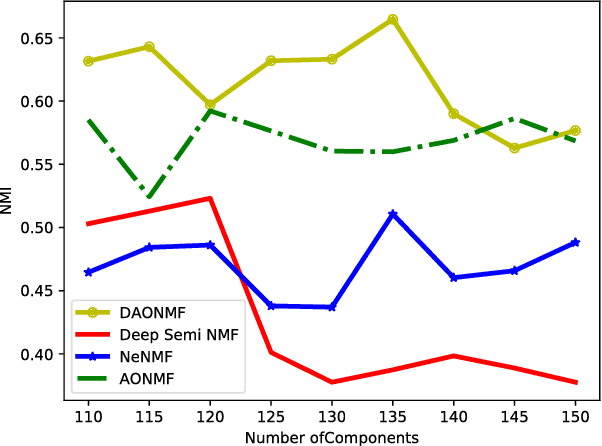
Nonnegative Matrix Factorization (NMF) is a widely used technique for data representation. Inspired by the expressive power of deep learning, several NMF variants equipped with deep architectures have been proposed. However, these methods mostly use the only nonnegativity while ignoring task-specific features of data. In this paper, we propose a novel deep approximately orthogonal nonnegative matrix factorization method where both nonnegativity and orthogonality are imposed with the aim to perform a hierarchical clustering by using different level of abstractions of data. Experiment on two face image datasets showed that the proposed method achieved better clustering performance than other deep matrix factorization methods and state-of-the-art single layer NMF variants.