 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFathomGPT: A Natural Language Interface for Interactively Exploring Ocean Science Data
Dec 03, 2024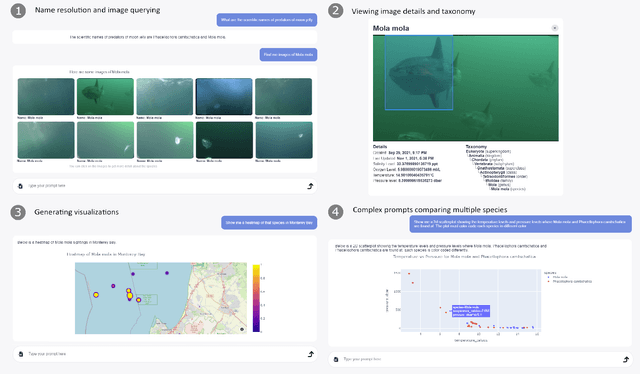
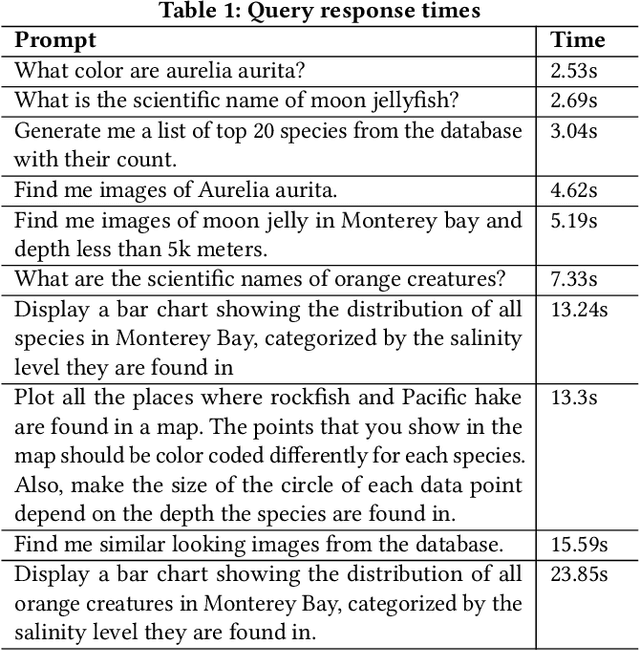
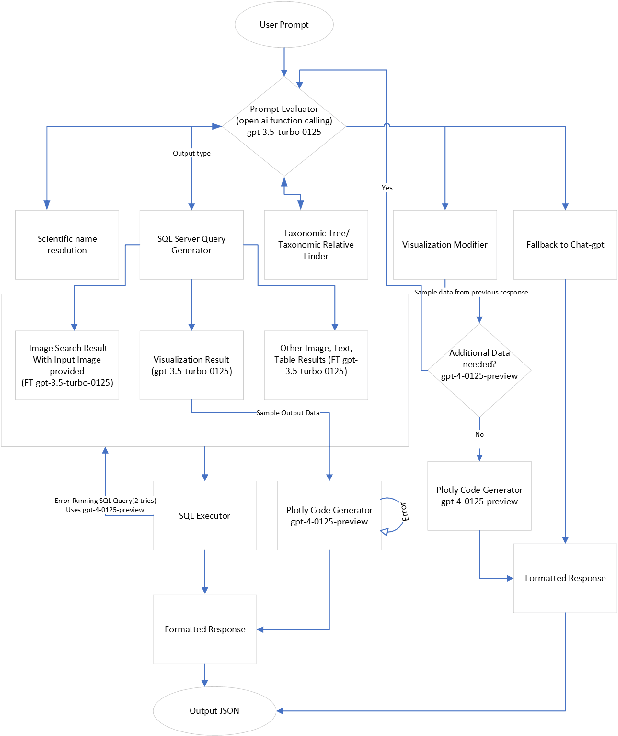
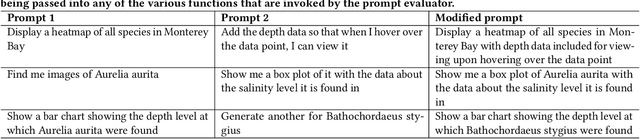
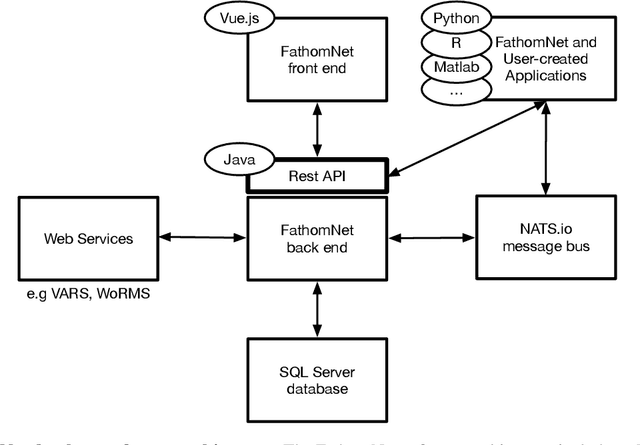
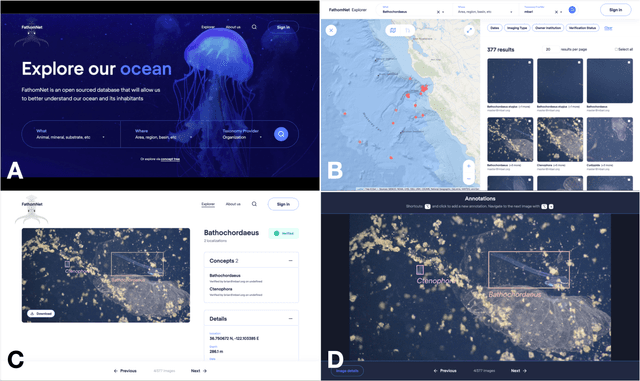
We introduce FathomGPT, an open source system for the interactive investigation of ocean science data via a natural language interface. FathomGPT was developed in close collaboration with marine scientists to enable researchers to explore and analyze the FathomNet image database. FathomGPT provides a custom information retrieval pipeline that leverages OpenAI's large language models to enable: the creation of complex queries to retrieve images, taxonomic information, and scientific measurements; mapping common names and morphological features to scientific names; generating interactive charts on demand; and searching by image or specified patterns within an image. In designing FathomGPT, particular emphasis was placed on enhancing the user's experience by facilitating free-form exploration and optimizing response times. We present an architectural overview and implementation details of FathomGPT, along with a series of ablation studies that demonstrate the effectiveness of our approach to name resolution, fine tuning, and prompt modification. We also present usage scenarios of interactive data exploration sessions and document feedback from ocean scientists and machine learning experts.
* The first two authors contributed equally to this work. Accepted to the 37th Annual ACM Symposium on User Interface Software and Technology (UIST 2024)
FathomVerse: A community science dataset for ocean animal discovery
Dec 02, 2024



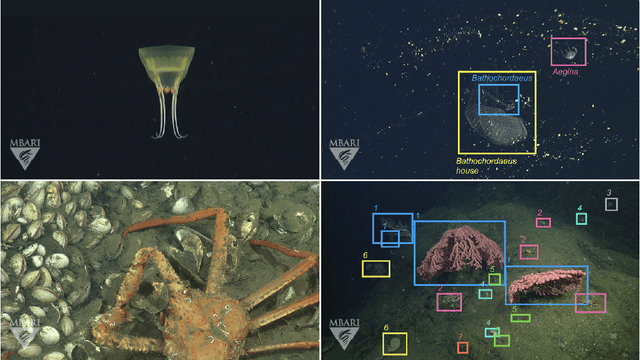
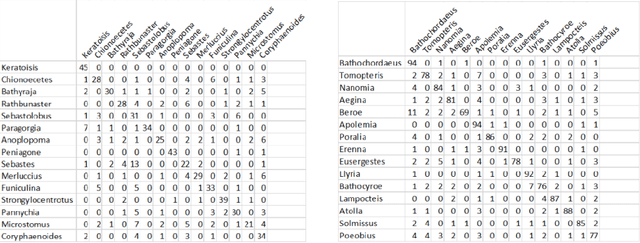
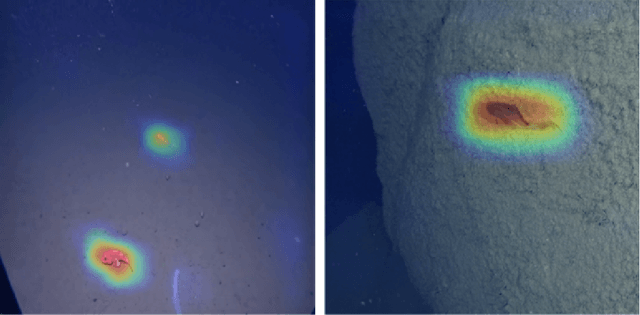
Can computer vision help us explore the ocean? The ultimate challenge for computer vision is to recognize any visual phenomena, more than only the objects and animals humans encounter in their terrestrial lives. Previous datasets have explored everyday objects and fine-grained categories humans see frequently. We present the FathomVerse v0 detection dataset to push the limits of our field by exploring animals that rarely come in contact with people in the deep sea. These animals present a novel vision challenge. The FathomVerse v0 dataset consists of 3843 images with 8092 bounding boxes from 12 distinct morphological groups recorded at two locations on the deep seafloor that are new to computer vision. It features visually perplexing scenarios such as an octopus intertwined with a sea star, and confounding categories like vampire squids and sea spiders. This dataset can push forward research on topics like fine-grained transfer learning, novel category discovery, species distribution modeling, and carbon cycle analysis, all of which are important to the care and husbandry of our planet.
The FathomNet2023 Competition Dataset
Jul 17, 2023
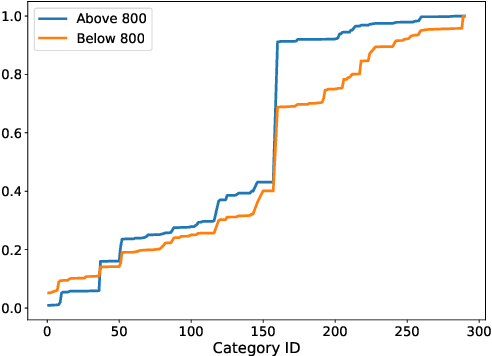
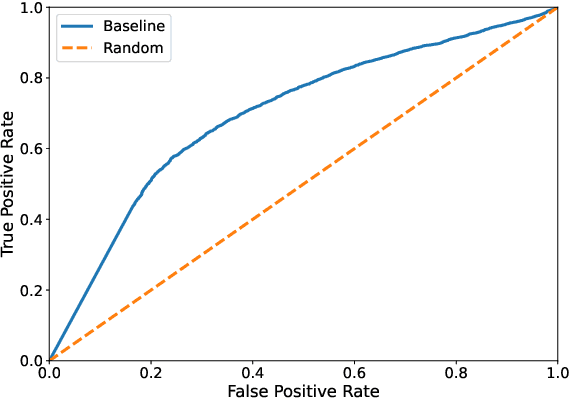
Ocean scientists have been collecting visual data to study marine organisms for decades. These images and videos are extremely valuable both for basic science and environmental monitoring tasks. There are tools for automatically processing these data, but none that are capable of handling the extreme variability in sample populations, image quality, and habitat characteristics that are common in visual sampling of the ocean. Such distribution shifts can occur over very short physical distances and in narrow time windows. Creating models that are able to recognize when an image or video sequence contains a new organism, an unusual collection of animals, or is otherwise out-of-sample is critical to fully leverage visual data in the ocean. The FathomNet2023 competition dataset presents a realistic scenario where the set of animals in the target data differs from the training data. The challenge is both to identify the organisms in a target image and assess whether it is out-of-sample.
A reinforcement learning path planning approach for range-only underwater target localization with autonomous vehicles
Jan 17, 2023



Underwater target localization using range-only and single-beacon (ROSB) techniques with autonomous vehicles has been used recently to improve the limitations of more complex methods, such as long baseline and ultra-short baseline systems. Nonetheless, in ROSB target localization methods, the trajectory of the tracking vehicle near the localized target plays an important role in obtaining the best accuracy of the predicted target position. Here, we investigate a Reinforcement Learning (RL) approach to find the optimal path that an autonomous vehicle should follow in order to increase and optimize the overall accuracy of the predicted target localization, while reducing time and power consumption. To accomplish this objective, different experimental tests have been designed using state-of-the-art deep RL algorithms. Our study also compares the results obtained with the analytical Fisher information matrix approach used in previous studies. The results revealed that the policy learned by the RL agent outperforms trajectories based on these analytical solutions, e.g. the median predicted error at the beginning of the target's localisation is 17% less. These findings suggest that using deep RL for localizing acoustic targets could be successfully applied to in-water applications that include tracking of acoustically tagged marine animals by autonomous underwater vehicles. This is envisioned as a first necessary step to validate the use of RL to tackle such problems, which could be used later on in a more complex scenarios
* Accepted at CASE2022. Code at this Github repository https://github.com/imasmitja/RLforUTracking
FathomNet: A global underwater image training set for enabling artificial intelligence in the ocean
Oct 02, 2021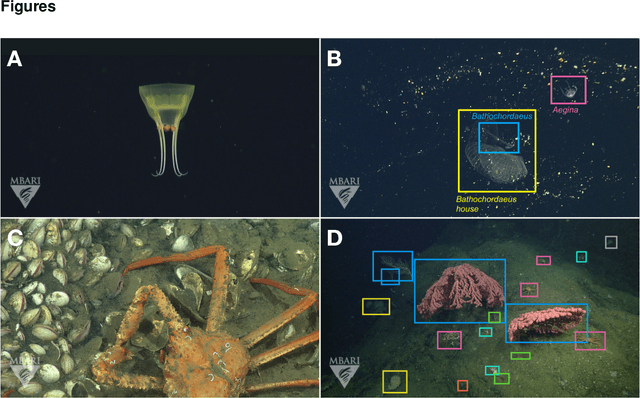
Ocean-going platforms are integrating high-resolution camera feeds for observation and navigation, producing a deluge of visual data. The volume and rate of this data collection can rapidly outpace researchers' abilities to process and analyze them. Recent advances in machine learning enable fast, sophisticated analysis of visual data, but have had limited success in the ocean due to lack of data set standardization, insufficient formatting, and aggregation of existing, expertly curated imagery for use by data scientists. To address this need, we have built FathomNet, a public platform that makes use of existing, expertly curated data. Initial efforts have leveraged MBARI's Video Annotation and Reference System and annotated deep sea video database, which has more than 7M annotations, 1M frame grabs, and 5k terms in the knowledgebase, with additional contributions by National Geographic Society (NGS) and NOAA's Office of Ocean Exploration and Research. FathomNet has over 160k localizations of 1.4k midwater and benthic classes, and contains more than 70k iconic and non-iconic views of marine animals, underwater equipment, debris, etc. We demonstrate how machine learning models trained on FathomNet data can be applied across different institutional video data, and enable automated acquisition and tracking of midwater animals using a remotely operated vehicle. As FathomNet continues to develop and incorporate more image data from other oceanographic community members, this effort will enable scientists, explorers, policymakers, storytellers, and the public to understand and care for our ocean.
FathomNet: An underwater image training database for ocean exploration and discovery
Jul 10, 2020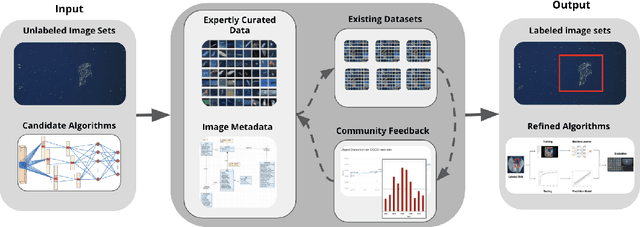
Thousands of hours of marine video data are collected annually from remotely operated vehicles (ROVs) and other underwater assets. However, current manual methods of analysis impede the full utilization of collected data for real time algorithms for ROV and large biodiversity analyses. FathomNet is a novel baseline image training set, optimized to accelerate development of modern, intelligent, and automated analysis of underwater imagery. Our seed data set consists of an expertly annotated and continuously maintained database with more than 26,000 hours of videotape, 6.8 million annotations, and 4,349 terms in the knowledge base. FathomNet leverages this data set by providing imagery, localizations, and class labels of underwater concepts in order to enable machine learning algorithm development. To date, there are more than 80,000 images and 106,000 localizations for 233 different classes, including midwater and benthic organisms. Our experiments consisted of training various deep learning algorithms with approaches to address weakly supervised localization, image labeling, object detection and classification which prove to be promising. While we find quality results on prediction for this new dataset, our results indicate that we are ultimately in need of a larger data set for ocean exploration.