 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructurally Consistent MRI Colorization using Cross-modal Fusion Learning
Dec 12, 2024Medical image colorization can greatly enhance the interpretability of the underlying imaging modality and provide insights into human anatomy. The objective of medical image colorization is to transfer a diverse spectrum of colors distributed across human anatomy from Cryosection data to source MRI data while retaining the structures of the MRI. To achieve this, we propose a novel architecture for structurally consistent color transfer to the source MRI data. Our architecture fuses segmentation semantics of Cryosection images for stable contextual colorization of various organs in MRI images. For colorization, we neither require precise registration between MRI and Cryosection images, nor segmentation of MRI images. Additionally, our architecture incorporates a feature compression-and-activation mechanism to capture organ-level global information and suppress noise, enabling the distinction of organ-specific data in MRI scans for more accurate and realistic organ-specific colorization. Our experiments demonstrate that our architecture surpasses the existing methods and yields better quantitative and qualitative results.
FathomGPT: A Natural Language Interface for Interactively Exploring Ocean Science Data
Dec 03, 2024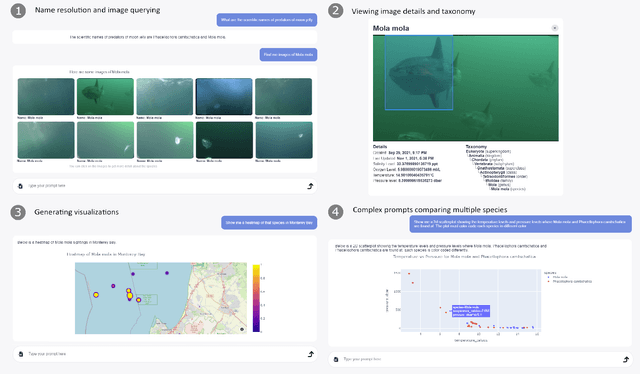
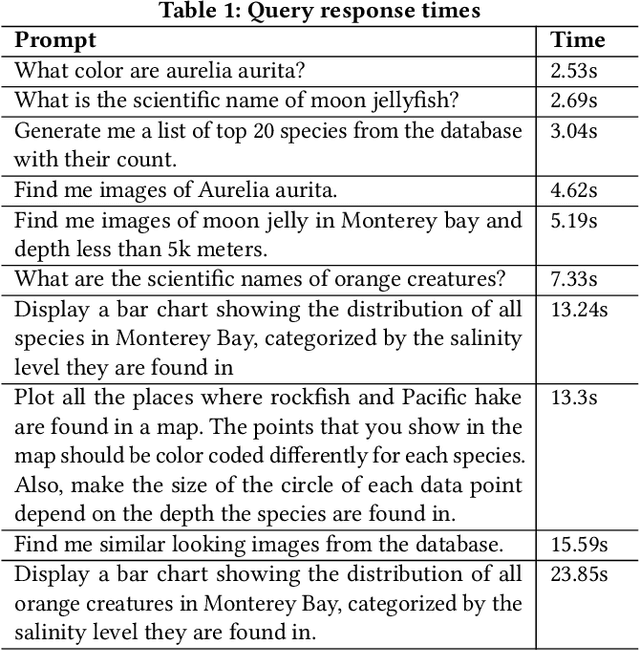
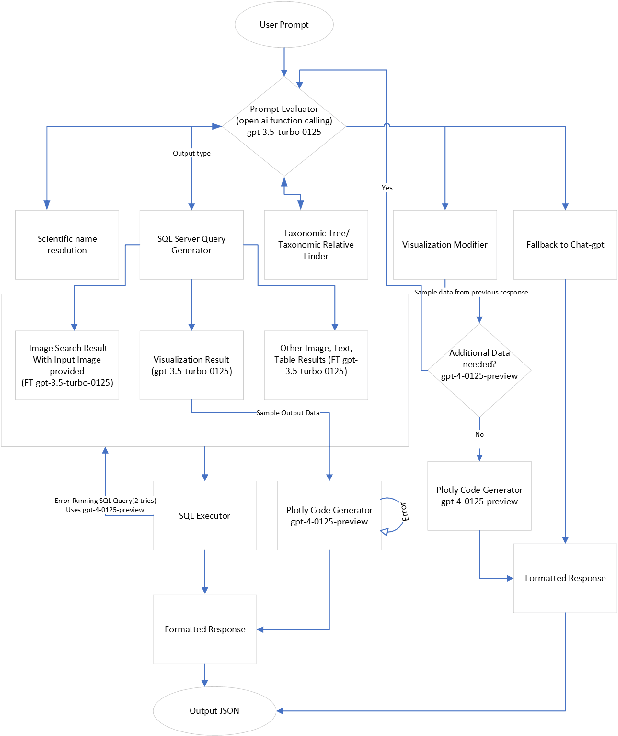
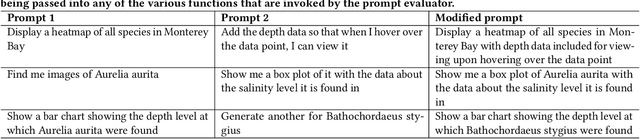
We introduce FathomGPT, an open source system for the interactive investigation of ocean science data via a natural language interface. FathomGPT was developed in close collaboration with marine scientists to enable researchers to explore and analyze the FathomNet image database. FathomGPT provides a custom information retrieval pipeline that leverages OpenAI's large language models to enable: the creation of complex queries to retrieve images, taxonomic information, and scientific measurements; mapping common names and morphological features to scientific names; generating interactive charts on demand; and searching by image or specified patterns within an image. In designing FathomGPT, particular emphasis was placed on enhancing the user's experience by facilitating free-form exploration and optimizing response times. We present an architectural overview and implementation details of FathomGPT, along with a series of ablation studies that demonstrate the effectiveness of our approach to name resolution, fine tuning, and prompt modification. We also present usage scenarios of interactive data exploration sessions and document feedback from ocean scientists and machine learning experts.
* The first two authors contributed equally to this work. Accepted to the 37th Annual ACM Symposium on User Interface Software and Technology (UIST 2024)
HEROES: Unreal Engine-based Human and Emergency Robot Operation Education System
Sep 25, 2023



Training and preparing first responders and humanitarian robots for Mass Casualty Incidents (MCIs) often poses a challenge owing to the lack of realistic and easily accessible test facilities. While such facilities can offer realistic scenarios post an MCI that can serve training and educational purposes for first responders and humanitarian robots, they are often hard to access owing to logistical constraints. To overcome this challenge, we present HEROES- a versatile Unreal Engine simulator for designing novel training simulations for humans and emergency robots for such urban search and rescue operations. The proposed HEROES simulator is capable of generating synthetic datasets for machine learning pipelines that are used for training robot navigation. This work addresses the necessity for a comprehensive training platform in the robotics community, ensuring pragmatic and efficient preparation for real-world emergency scenarios. The strengths of our simulator lie in its adaptability, scalability, and ability to facilitate collaboration between robot developers and first responders, fostering synergy in developing effective strategies for search and rescue operations in MCIs. We conducted a preliminary user study with an 81% positive response supporting the ability of HEROES to generate sufficiently varied environments, and a 78% positive response affirming the usefulness of the simulation environment of HEROES.