 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Controllable Denoising for Image and Video
Mar 29, 2023Controllable image denoising aims to generate clean samples with human perceptual priors and balance sharpness and smoothness. In traditional filter-based denoising methods, this can be easily achieved by adjusting the filtering strength. However, for NN (Neural Network)-based models, adjusting the final denoising strength requires performing network inference each time, making it almost impossible for real-time user interaction. In this paper, we introduce Real-time Controllable Denoising (RCD), the first deep image and video denoising pipeline that provides a fully controllable user interface to edit arbitrary denoising levels in real-time with only one-time network inference. Unlike existing controllable denoising methods that require multiple denoisers and training stages, RCD replaces the last output layer (which usually outputs a single noise map) of an existing CNN-based model with a lightweight module that outputs multiple noise maps. We propose a novel Noise Decorrelation process to enforce the orthogonality of the noise feature maps, allowing arbitrary noise level control through noise map interpolation. This process is network-free and does not require network inference. Our experiments show that RCD can enable real-time editable image and video denoising for various existing heavy-weight models without sacrificing their original performance.
Robust Video Background Identification by Dominant Rigid Motion Estimation
Mar 06, 2019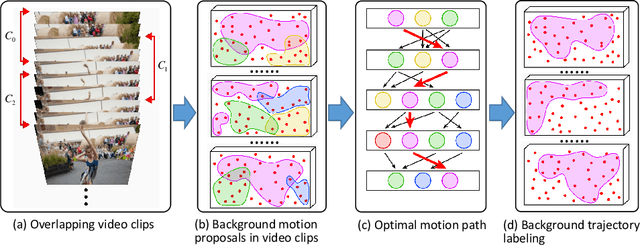

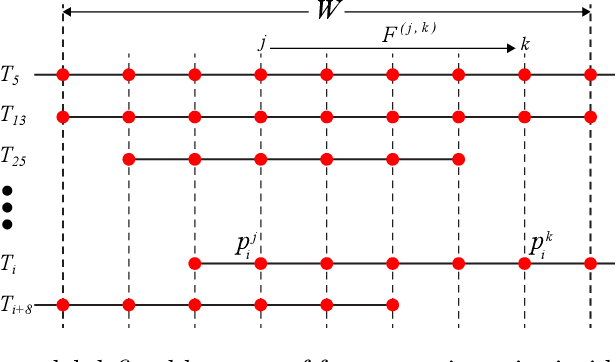
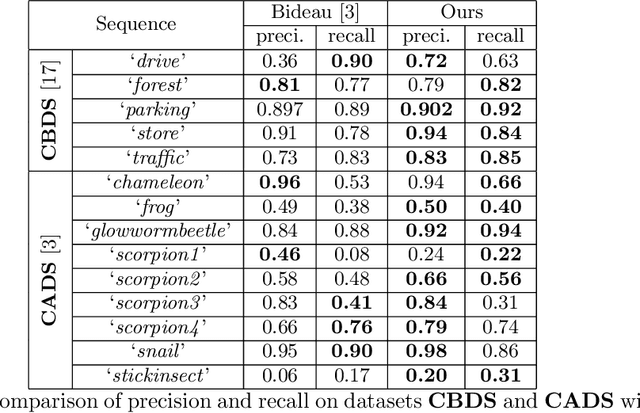
The ability to identify the static background in videos captured by a moving camera is an important pre-requisite for many video applications (e.g. video stabilization, stitching, and segmentation). Existing methods usually face difficulties when the foreground objects occupy a larger area than the background in the image. Many methods also cannot scale up to handle densely sampled feature trajectories. In this paper, we propose an efficient local-to-global method to identify background, based on the assumption that as long as there is sufficient camera motion, the cumulative background features will have the largest amount of trajectories. Our motion model at the two-frame level is based on the epipolar geometry so that there will be no over-segmentation problem, another issue that plagues the 2D motion segmentation approach. Foreground objects erroneously labelled due to intermittent motions are also taken care of by checking their global consistency with the final estimated background motion. Lastly, by virtue of its efficiency, our method can deal with densely sampled trajectories. It outperforms several state-of-the-art motion segmentation methods on public datasets, both quantitatively and qualitatively.