 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeGO: Leveraging a Surface Deformation Network for Animatable Stylized Face Generation with One Example
Mar 22, 2024
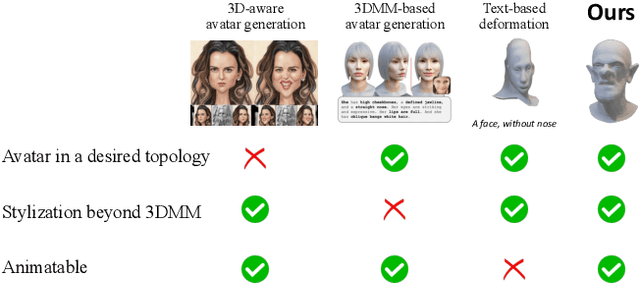


Recent advances in 3D face stylization have made significant strides in few to zero-shot settings. However, the degree of stylization achieved by existing methods is often not sufficient for practical applications because they are mostly based on statistical 3D Morphable Models (3DMM) with limited variations. To this end, we propose a method that can produce a highly stylized 3D face model with desired topology. Our methods train a surface deformation network with 3DMM and translate its domain to the target style using a paired exemplar. The network achieves stylization of the 3D face mesh by mimicking the style of the target using a differentiable renderer and directional CLIP losses. Additionally, during the inference process, we utilize a Mesh Agnostic Encoder (MAGE) that takes deformation target, a mesh of diverse topologies as input to the stylization process and encodes its shape into our latent space. The resulting stylized face model can be animated by commonly used 3DMM blend shapes. A set of quantitative and qualitative evaluations demonstrate that our method can produce highly stylized face meshes according to a given style and output them in a desired topology. We also demonstrate example applications of our method including image-based stylized avatar generation, linear interpolation of geometric styles, and facial animation of stylized avatars.
Fast and Accurate Single-Image Depth Estimation on Mobile Devices, Mobile AI 2021 Challenge: Report
May 17, 2021


Depth estimation is an important computer vision problem with many practical applications to mobile devices. While many solutions have been proposed for this task, they are usually very computationally expensive and thus are not applicable for on-device inference. To address this problem, we introduce the first Mobile AI challenge, where the target is to develop an end-to-end deep learning-based depth estimation solutions that can demonstrate a nearly real-time performance on smartphones and IoT platforms. For this, the participants were provided with a new large-scale dataset containing RGB-depth image pairs obtained with a dedicated stereo ZED camera producing high-resolution depth maps for objects located at up to 50 meters. The runtime of all models was evaluated on the popular Raspberry Pi 4 platform with a mobile ARM-based Broadcom chipset. The proposed solutions can generate VGA resolution depth maps at up to 10 FPS on the Raspberry Pi 4 while achieving high fidelity results, and are compatible with any Android or Linux-based mobile devices. A detailed description of all models developed in the challenge is provided in this paper.