 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network Verification is a Programming Language Challenge
Jan 10, 2025
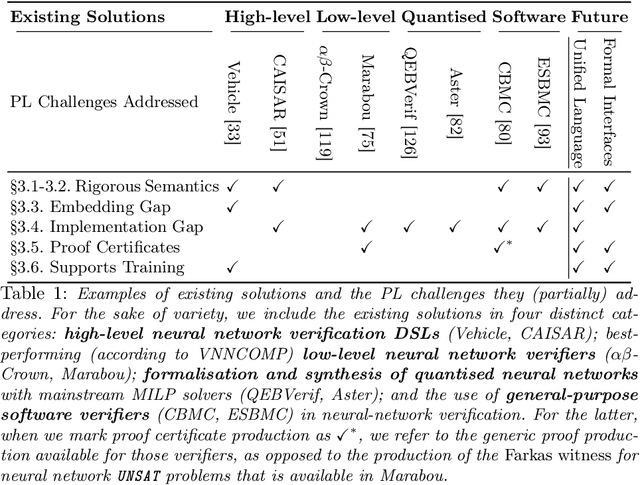

Neural network verification is a new and rapidly developing field of research. So far, the main priority has been establishing efficient verification algorithms and tools, while proper support from the programming language perspective has been considered secondary or unimportant. Yet, there is mounting evidence that insights from the programming language community may make a difference in the future development of this domain. In this paper, we formulate neural network verification challenges as programming language challenges and suggest possible future solutions.
* Accepted at ESOP 2025, European Symposium on Programming Languages
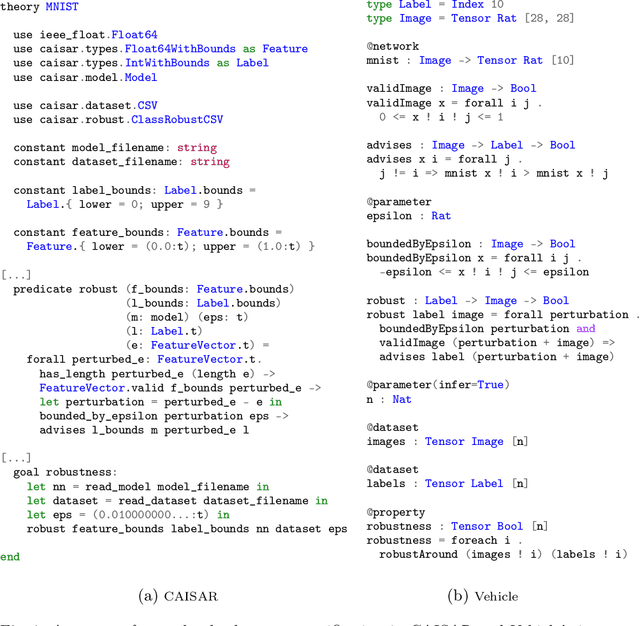
CAISAR: A platform for Characterizing Artificial Intelligence Safety and Robustness
Jun 07, 2022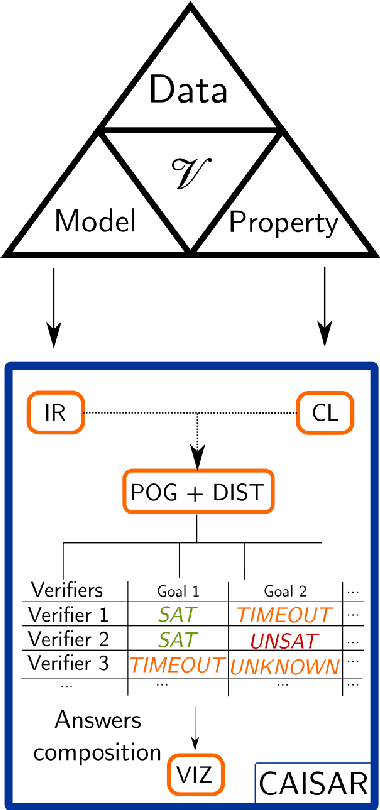
We present CAISAR, an open-source platform under active development for the characterization of AI systems' robustness and safety. CAISAR provides a unified entry point for defining verification problems by using WhyML, the mature and expressive language of the Why3 verification platform. Moreover, CAISAR orchestrates and composes state-of-the-art machine learning verification tools which, individually, are not able to efficiently handle all problems but, collectively, can cover a growing number of properties. Our aim is to assist, on the one hand, the V\&V process by reducing the burden of choosing the methodology tailored to a given verification problem, and on the other hand the tools developers by factorizing useful features-visualization, report generation, property description-in one platform. CAISAR will soon be available at https://git.frama-c.com/pub/caisar.
DISCO Verification: Division of Input Space into COnvex polytopes for neural network verification
May 17, 2021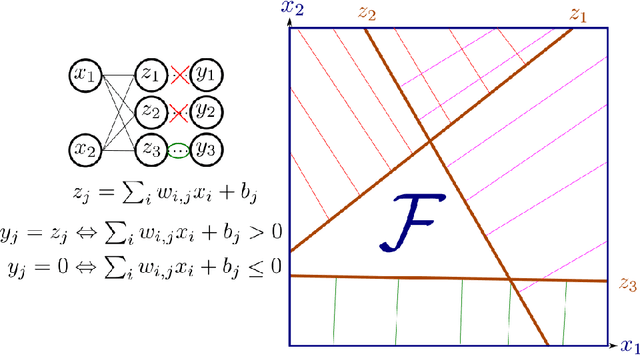

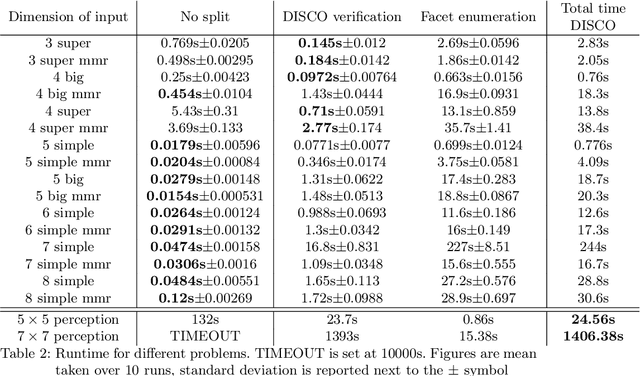
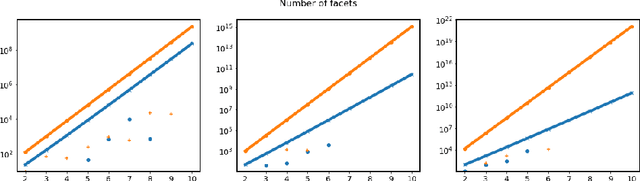
The impressive results of modern neural networks partly come from their non linear behaviour. Unfortunately, this property makes it very difficult to apply formal verification tools, even if we restrict ourselves to networks with a piecewise linear structure. However, such networks yields subregions that are linear and thus simpler to analyse independently. In this paper, we propose a method to simplify the verification problem by operating a partitionning into multiple linear subproblems. To evaluate the feasibility of such an approach, we perform an empirical analysis of neural networks to estimate the number of linear regions, and compare them to the bounds currently known. We also present the impact of a technique aiming at reducing the number of linear regions during training.
CAMUS: A Framework to Build Formal Specifications for Deep Perception Systems Using Simulators
Nov 25, 2019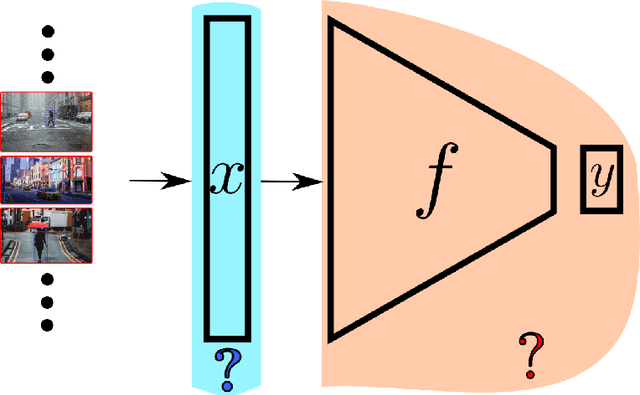
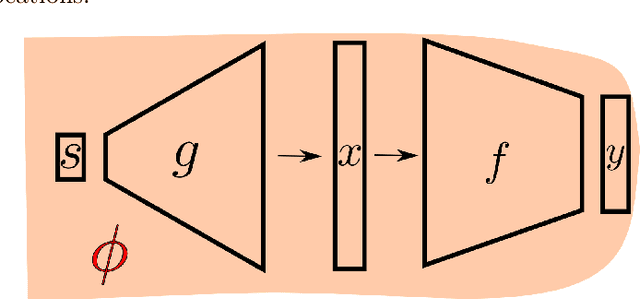
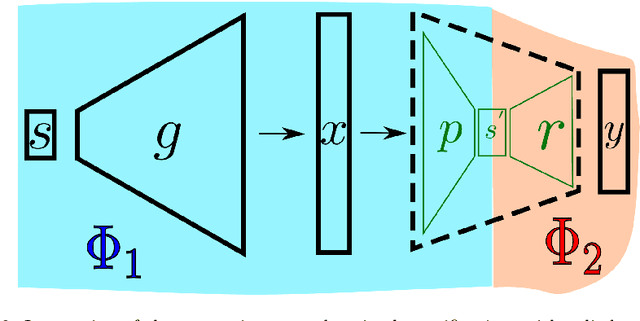
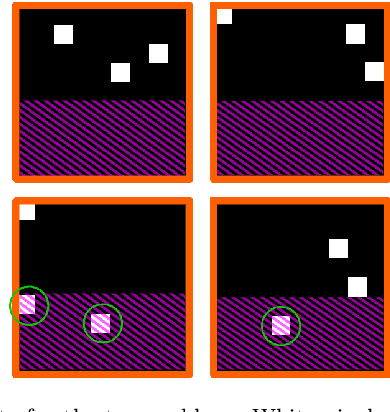
The topic of provable deep neural network robustness has raised considerable interest in recent years. Most research has focused on adversarial robustness, which studies the robustness of perceptive models in the neighbourhood of particular samples. However, other works have proved global properties of smaller neural networks. Yet, formally verifying perception remains uncharted. This is due notably to the lack of relevant properties to verify, as the distribution of possible inputs cannot be formally specified. We propose to take advantage of the simulators often used either to train machine learning models or to check them with statistical tests, a growing trend in industry. Our formulation allows us to formally express and verify safety properties on perception units, covering all cases that could ever be generated by the simulator, to the difference of statistical tests which cover only seen examples. Along with this theoretical formulation , we provide a tool to translate deep learning models into standard logical formulae. As a proof of concept, we train a toy example mimicking an autonomous car perceptive unit, and we formally verify that it will never fail to capture the relevant information in the provided inputs.