 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen to ASK: Uncertainty-Gated Language Assistance for Reinforcement Learning
Apr 02, 2026Reinforcement learning (RL) agents often struggle with out-of-distribution (OOD) scenarios, leading to high uncertainty and random behavior. While language models (LMs) contain valuable world knowledge, larger ones incur high computational costs, hindering real-time use, and exhibit limitations in autonomous planning. We introduce Adaptive Safety through Knowledge (ASK), which combines smaller LMs with trained RL policies to enhance OOD generalization without retraining. ASK employs Monte Carlo Dropout to assess uncertainty and queries the LM for action suggestions only when uncertainty exceeds a set threshold. This selective use preserves the efficiency of existing policies while leveraging the language model's reasoning in uncertain situations. In experiments on the FrozenLake environment, ASK shows no improvement in-domain, but demonstrates robust navigation in transfer tasks, achieving a reward of 0.95. Our findings indicate that effective neuro-symbolic integration requires careful orchestration rather than simple combination, highlighting the need for sufficient model scale and effective hybridization mechanisms for successful OOD generalization.
Explorative Imitation Learning: A Path Signature Approach for Continuous Environments
Jul 05, 2024



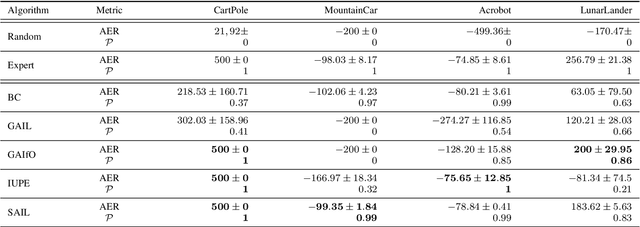
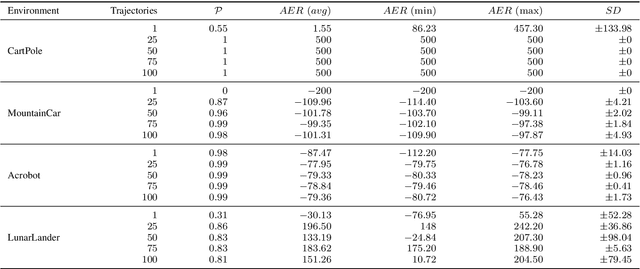
Some imitation learning methods combine behavioural cloning with self-supervision to infer actions from state pairs. However, most rely on a large number of expert trajectories to increase generalisation and human intervention to capture key aspects of the problem, such as domain constraints. In this paper, we propose Continuous Imitation Learning from Observation (CILO), a new method augmenting imitation learning with two important features: (i) exploration, allowing for more diverse state transitions, requiring less expert trajectories and resulting in fewer training iterations; and (ii) path signatures, allowing for automatic encoding of constraints, through the creation of non-parametric representations of agents and expert trajectories. We compared CILO with a baseline and two leading imitation learning methods in five environments. It had the best overall performance of all methods in all environments, outperforming the expert in two of them.
Self-Supervised Adversarial Imitation Learning
Apr 21, 2023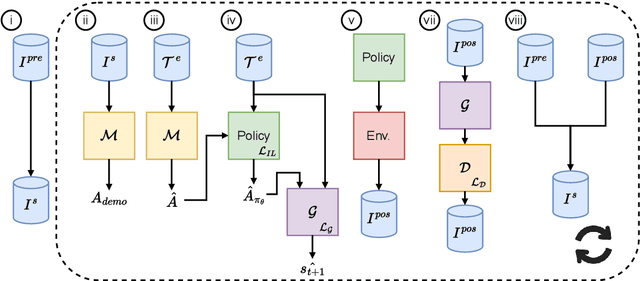
Behavioural cloning is an imitation learning technique that teaches an agent how to behave via expert demonstrations. Recent approaches use self-supervision of fully-observable unlabelled snapshots of the states to decode state pairs into actions. However, the iterative learning scheme employed by these techniques is prone to get trapped into bad local minima. Previous work uses goal-aware strategies to solve this issue. However, this requires manual intervention to verify whether an agent has reached its goal. We address this limitation by incorporating a discriminator into the original framework, offering two key advantages and directly solving a learning problem previous work had. First, it disposes of the manual intervention requirement. Second, it helps in learning by guiding function approximation based on the state transition of the expert's trajectories. Third, the discriminator solves a learning issue commonly present in the policy model, which is to sometimes perform a `no action' within the environment until the agent finally halts.
Imitating Unknown Policies via Exploration
Aug 13, 2020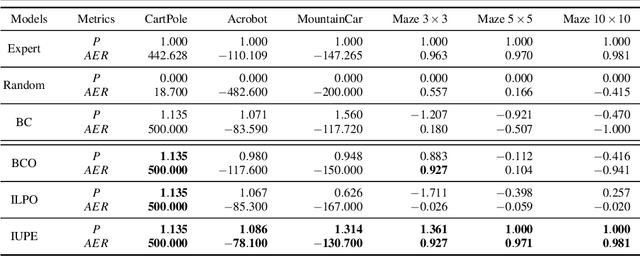
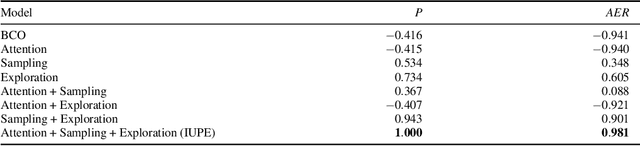
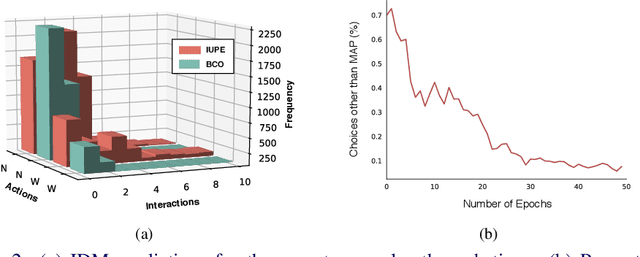
Behavioral cloning is an imitation learning technique that teaches an agent how to behave through expert demonstrations. Recent approaches use self-supervision of fully-observable unlabeled snapshots of the states to decode state-pairs into actions. However, the iterative learning scheme from these techniques are prone to getting stuck into bad local minima. We address these limitations incorporating a two-phase model into the original framework, which learns from unlabeled observations via exploration, substantially improving traditional behavioral cloning by exploiting (i) a sampling mechanism to prevent bad local minima, (ii) a sampling mechanism to improve exploration, and (iii) self-attention modules to capture global features. The resulting technique outperforms the previous state-of-the-art in four different environments by a large margin.
Augmented Behavioral Cloning from Observation
Apr 28, 2020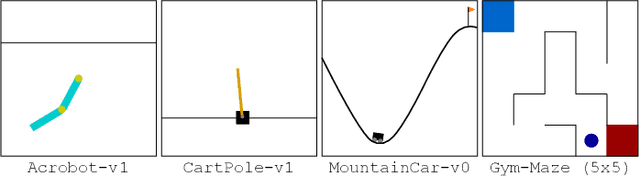

Imitation from observation is a computational technique that teaches an agent on how to mimic the behavior of an expert by observing only the sequence of states from the expert demonstrations. Recent approaches learn the inverse dynamics of the environment and an imitation policy by interleaving epochs of both models while changing the demonstration data. However, such approaches often get stuck into sub-optimal solutions that are distant from the expert, limiting their imitation effectiveness. We address this problem with a novel approach that overcomes the problem of reaching bad local minima by exploring: (I) a self-attention mechanism that better captures global features of the states; and (ii) a sampling strategy that regulates the observations that are used for learning. We show empirically that our approach outperforms the state-of-the-art approaches in four different environments by a large margin.
HAPRec: Hybrid Activity and Plan Recognizer
Apr 28, 2020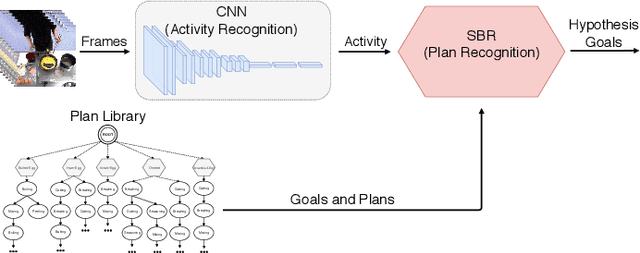
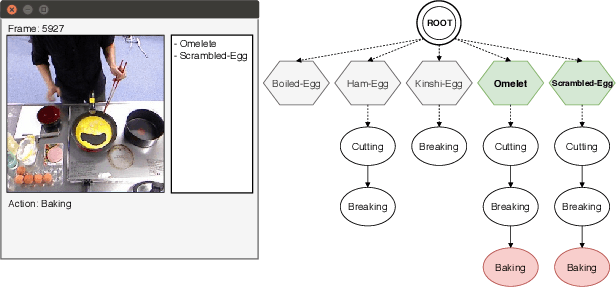
Computer-based assistants have recently attracted much interest due to its applicability to ambient assisted living. Such assistants have to detect and recognize the high-level activities and goals performed by the assisted human beings. In this work, we demonstrate activity recognition in an indoor environment in order to identify the goal towards which the subject of the video is pursuing. Our hybrid approach combines an action recognition module and a goal recognition algorithm to identify the ultimate goal of the subject in the video.
Classifying Norm Conflicts using Learned Semantic Representations
May 13, 2019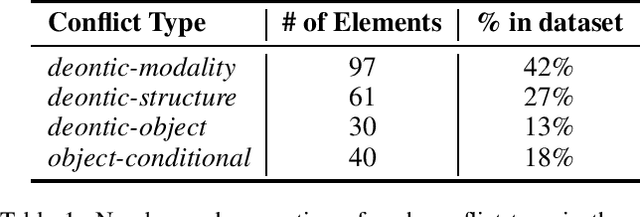
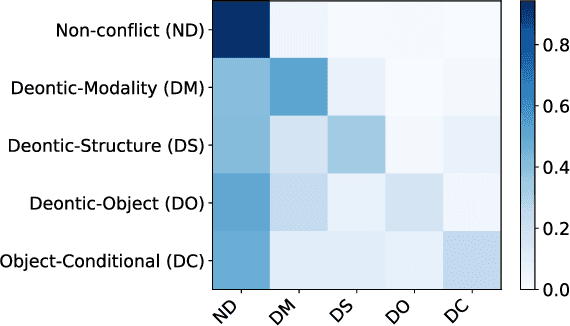
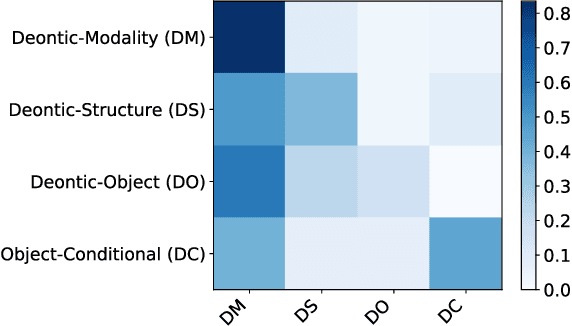
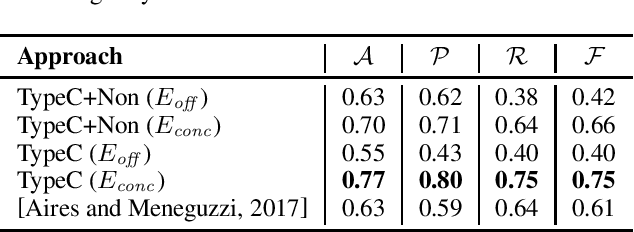
While most social norms are informal, they are often formalized by companies in contracts to regulate trades of goods and services. When poorly written, contracts may contain normative conflicts resulting from opposing deontic meanings or contradict specifications. As contracts tend to be long and contain many norms, manually identifying such conflicts requires human-effort, which is time-consuming and error-prone. Automating such task benefits contract makers increasing productivity and making conflict identification more reliable. To address this problem, we introduce an approach to detect and classify norm conflicts in contracts by converting them into latent representations that preserve both syntactic and semantic information and training a model to classify norm conflicts in four conflict types. Our results reach the new state of the art when compared to a previous approach.