 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurvival is the Only Reward: Sustainable Self-Training Through Environment-Mediated Selection
Jan 18, 2026Self-training systems often degenerate due to the lack of an external criterion for judging data quality, leading to reward hacking and semantic drift. This paper provides a proof-of-concept system architecture for stable self-training under sparse external feedback and bounded memory, and empirically characterises its learning dynamics and failure modes. We introduce a self-training architecture in which learning is mediated exclusively by environmental viability, rather than by reward, objective functions, or externally defined fitness criteria. Candidate behaviours are executed under real resource constraints, and only those whose environmental effects both persist and preserve the possibility of future interaction are propagated. The environment does not provide semantic feedback, dense rewards, or task-specific supervision; selection operates solely through differential survival of behaviours as world-altering events, making proxy optimisation impossible and rendering reward-hacking evolutionarily unstable. Analysis of semantic dynamics shows that improvement arises primarily through the persistence of effective and repeatable strategies under a regime of consolidation and pruning, a paradigm we refer to as negative-space learning (NSL), and that models develop meta-learning strategies (such as deliberate experimental failure in order to elicit informative error messages) without explicit instruction. This work establishes that environment-grounded selection enables sustainable open-ended self-improvement, offering a viable path toward more robust and generalisable autonomous systems without reliance on human-curated data or complex reward shaping.
Generalising from Self-Produced Data: Model Training Beyond Human Constraints
Apr 07, 2025


Current large language models (LLMs) are constrained by human-derived training data and limited by a single level of abstraction that impedes definitive truth judgments. This paper introduces a novel framework in which AI models autonomously generate and validate new knowledge through direct interaction with their environment. Central to this approach is an unbounded, ungamable numeric reward - such as annexed disk space or follower count - that guides learning without requiring human benchmarks. AI agents iteratively generate strategies and executable code to maximize this metric, with successful outcomes forming the basis for self-retraining and incremental generalisation. To mitigate model collapse and the warm start problem, the framework emphasizes empirical validation over textual similarity and supports fine-tuning via GRPO. The system architecture employs modular agents for environment analysis, strategy generation, and code synthesis, enabling scalable experimentation. This work outlines a pathway toward self-improving AI systems capable of advancing beyond human-imposed constraints toward autonomous general intelligence.
Establishing Performance Baselines in Fine-Tuning, Retrieval-Augmented Generation and Soft-Prompting for Non-Specialist LLM Users
Nov 10, 2023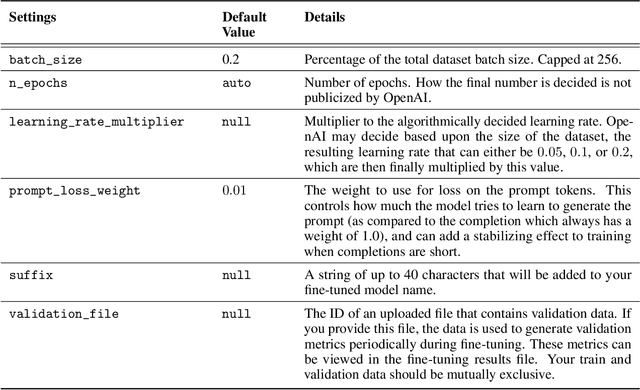
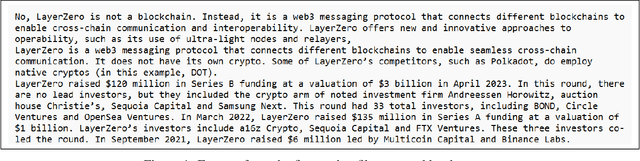
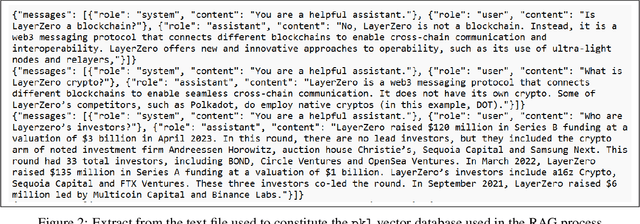
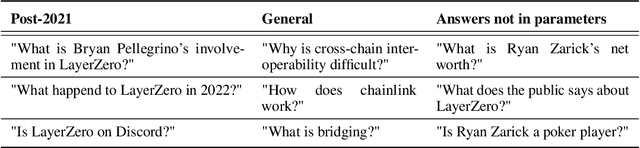
Research into methods for improving the performance of large language models (LLMs) through fine-tuning, retrieval-augmented generation (RAG) and soft-prompting has tended to focus on the use of highly technical or high-cost techniques, making many of the newly discovered approaches comparatively inaccessible to non-technical users. In this paper we tested an unmodified version of GPT 3.5, a fine-tuned version, and the same unmodified model when given access to a vectorised RAG database, both in isolation and in combination with a basic, non-algorithmic soft prompt. In each case we tested the model's ability to answer a set of 100 questions relating primarily to events that occurred after September 2021 (the point at which GPT 3.5's training data set ends). We found that if commercial platforms are used and default settings are applied with no iteration in order to establish a baseline set of outputs, a fine-tuned model outperforms GPT 3.5 Turbo, while the RAG approach out-performed both. The application of a soft prompt significantly improved the performance of each approach.
KeyIn: Discovering Subgoal Structure with Keyframe-based Video Prediction
Apr 11, 2019



Real-world image sequences can often be naturally decomposed into a small number of frames depicting interesting, highly stochastic moments (its $\textit{keyframes}$) and the low-variance frames in between them. In image sequences depicting trajectories to a goal, keyframes can be seen as capturing the $\textit{subgoals}$ of the sequence as they depict the high-variance moments of interest that ultimately led to the goal. In this paper, we introduce a video prediction model that discovers the keyframe structure of image sequences in an unsupervised fashion. We do so using a hierarchical Keyframe-Intermediate model (KeyIn) that stochastically predicts keyframes and their offsets in time and then uses these predictions to deterministically predict the intermediate frames. We propose a differentiable formulation of this problem that allows us to train the full hierarchical model using a sequence reconstruction loss. We show that our model is able to find meaningful keyframe structure in a simulated dataset of robotic demonstrations and that these keyframes can serve as subgoals for planning. Our model outperforms other hierarchical prediction approaches for planning on a simulated pushing task.
Multi-Modal Imitation Learning from Unstructured Demonstrations using Generative Adversarial Nets
Nov 23, 2017



Imitation learning has traditionally been applied to learn a single task from demonstrations thereof. The requirement of structured and isolated demonstrations limits the scalability of imitation learning approaches as they are difficult to apply to real-world scenarios, where robots have to be able to execute a multitude of tasks. In this paper, we propose a multi-modal imitation learning framework that is able to segment and imitate skills from unlabelled and unstructured demonstrations by learning skill segmentation and imitation learning jointly. The extensive simulation results indicate that our method can efficiently separate the demonstrations into individual skills and learn to imitate them using a single multi-modal policy. The video of our experiments is available at http://sites.google.com/view/nips17intentiongan