 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Tensegrity Robot Locomotion
Mar 08, 2017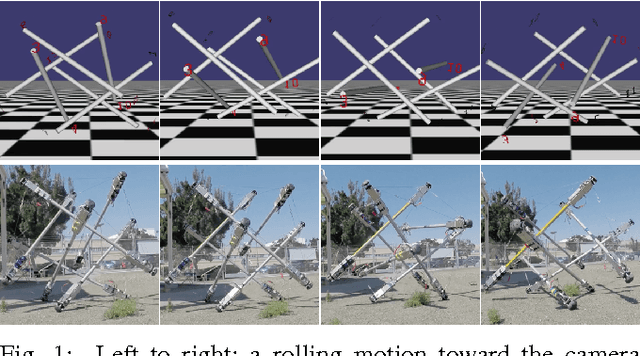
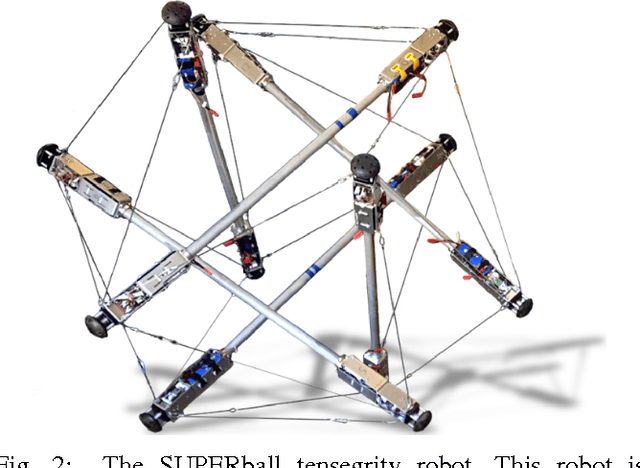
Tensegrity robots, composed of rigid rods connected by elastic cables, have a number of unique properties that make them appealing for use as planetary exploration rovers. However, control of tensegrity robots remains a difficult problem due to their unusual structures and complex dynamics. In this work, we show how locomotion gaits can be learned automatically using a novel extension of mirror descent guided policy search (MDGPS) applied to periodic locomotion movements, and we demonstrate the effectiveness of our approach on tensegrity robot locomotion. We evaluate our method with real-world and simulated experiments on the SUPERball tensegrity robot, showing that the learned policies generalize to changes in system parameters, unreliable sensor measurements, and variation in environmental conditions, including varied terrains and a range of different gravities. Our experiments demonstrate that our method not only learns fast, power-efficient feedback policies for rolling gaits, but that these policies can succeed with only the limited onboard sensing provided by SUPERball's accelerometers. We compare the learned feedback policies to learned open-loop policies and hand-engineered controllers, and demonstrate that the learned policy enables the first continuous, reliable locomotion gait for the real SUPERball robot. Our code and other supplementary materials are available from http://rll.berkeley.edu/drl_tensegrity
State Estimation for Tensegrity Robots
Feb 19, 2016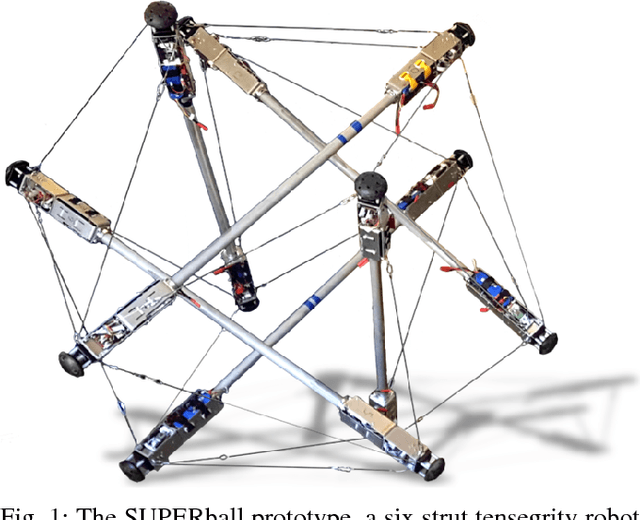
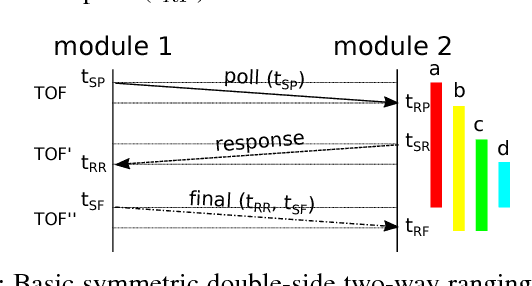
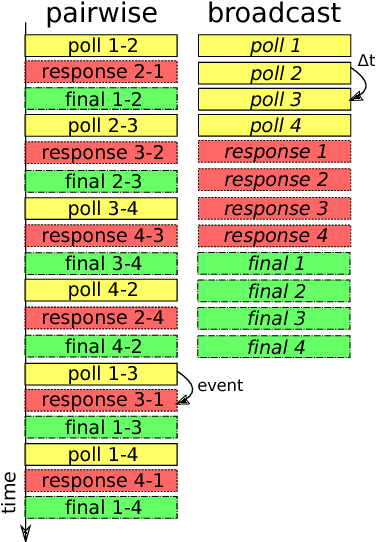
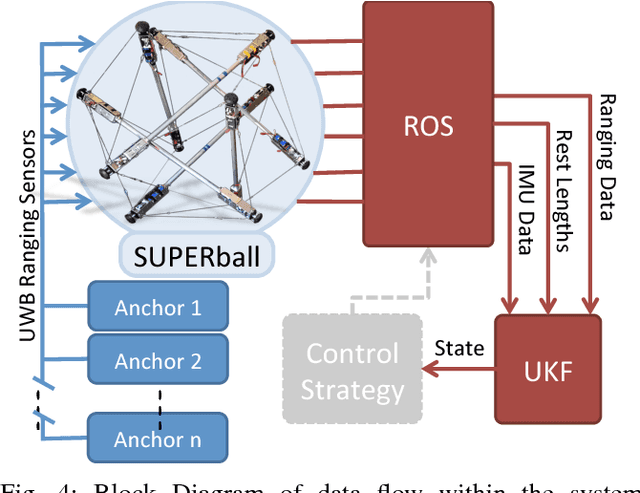
Tensegrity robots are a class of compliant robots that have many desirable traits when designing mass efficient systems that must interact with uncertain environments. Various promising control approaches have been proposed for tensegrity systems in simulation. Unfortunately, state estimation methods for tensegrity robots have not yet been thoroughly studied. In this paper, we present the design and evaluation of a state estimator for tensegrity robots. This state estimator will enable existing and future control algorithms to transfer from simulation to hardware. Our approach is based on the unscented Kalman filter (UKF) and combines inertial measurements, ultra wideband time-of-flight ranging measurements, and actuator state information. We evaluate the effectiveness of our method on the SUPERball, a tensegrity based planetary exploration robotic prototype. In particular, we conduct tests for evaluating both the robot's success in estimating global position in relation to fixed ranging base stations during rolling maneuvers as well as local behavior due to small-amplitude deformations induced by cable actuation.
A light-weight, multi-axis compliant tensegrity joint
Oct 26, 2015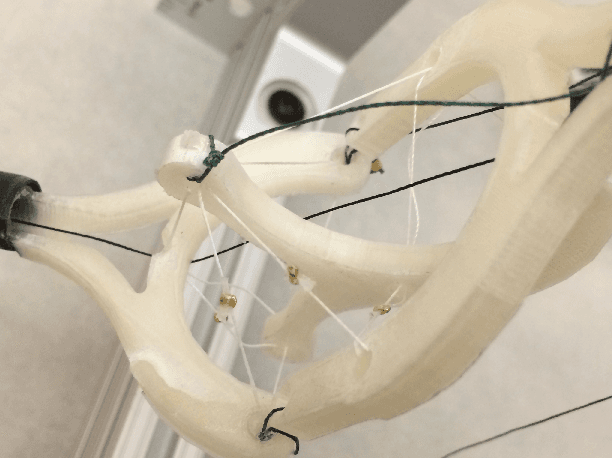
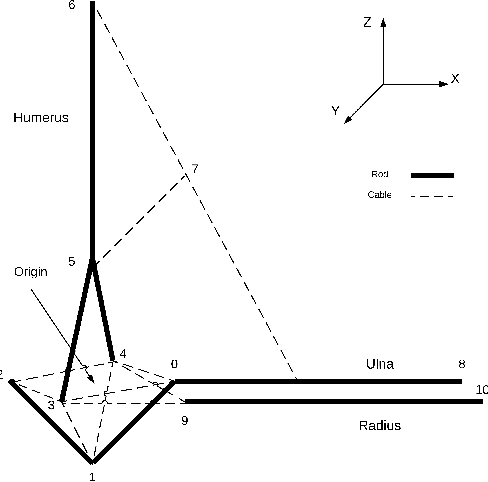
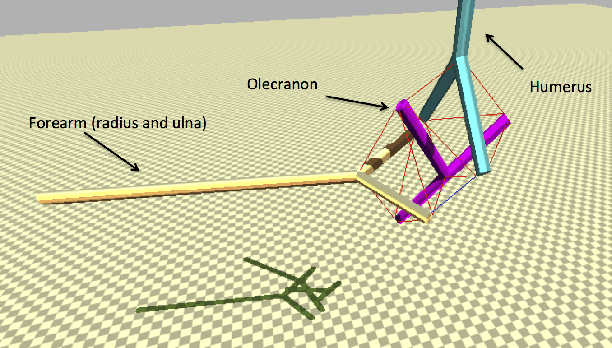
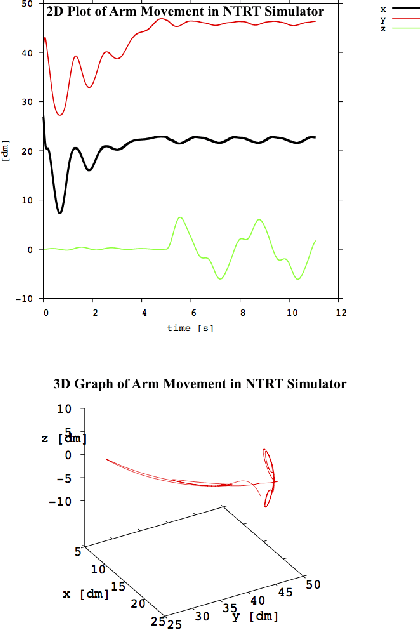
In this paper, we present a light-weight, multi- axis compliant tenegrity joint that is biologically inspired by the human elbow. This tensegrity elbow actuates by shortening and lengthening cable in a method inspired by muscular actuation in a person. Unlike many series elastic actuators, this joint is structurally compliant not just along each axis of rotation, but along other axes as well. Compliant robotic joints are indispensable in unpredictable environments, including ones where the robot must interface with a person. The joint also addresses the need for functional redundancy and flexibility, traits which are required for many applications that investigate the use of biologically accurate robotic models.