 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA computer vision based optical method for measuring fluid level in cell culture plates
Mar 24, 2023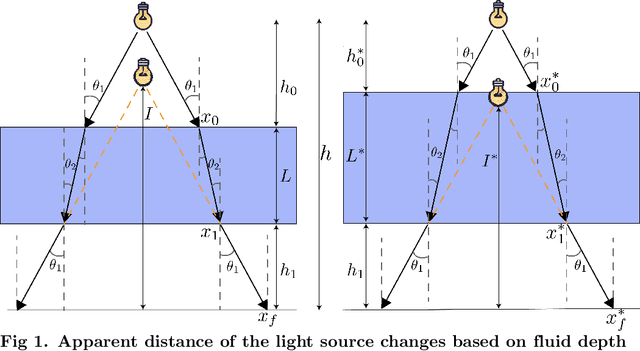
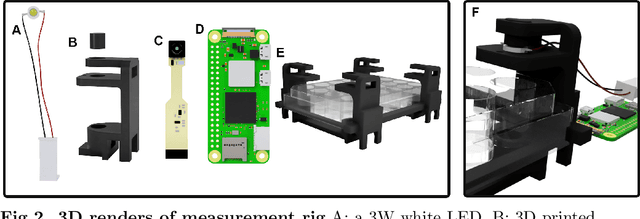
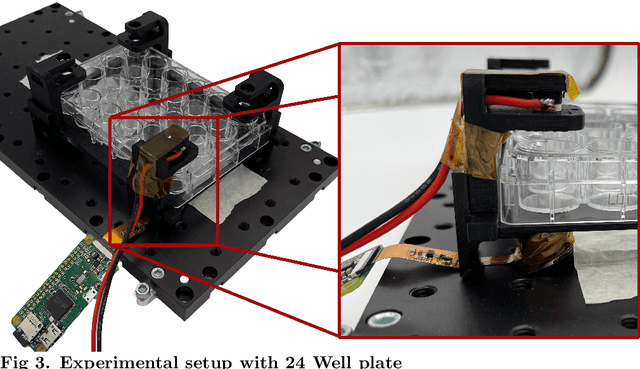
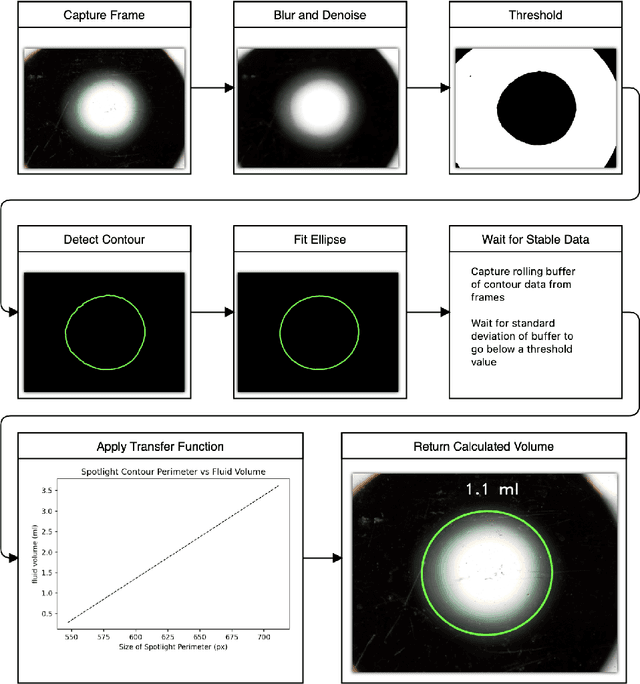
For a transparent well with a known volume capacity, changes in fluid level result in predictable changes in magnification of an overhead light source. For a given well size and fluid, the relationship between volume and magnification can be calculated if the fluid's index of refraction is known or in a naive fashion with a calibration procedure. Light source magnification can be measured through a camera and processed using computer vision contour analysis with OpenCV. This principle was applied in the design of a 3D printable sensing device using a raspberry pi zero and a camera
A Geometric Kinematic Model for Flexible Voxel-Based Robots
Aug 21, 2021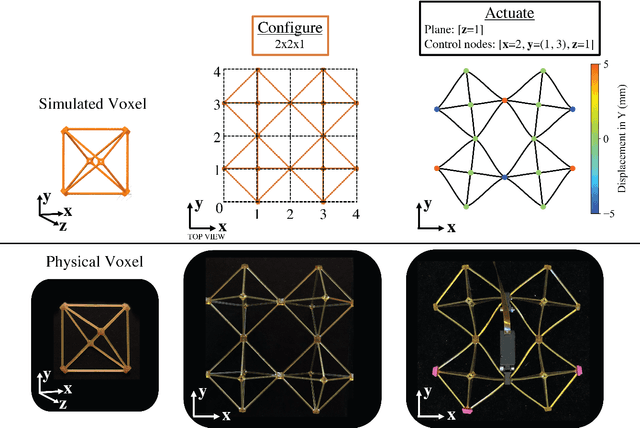
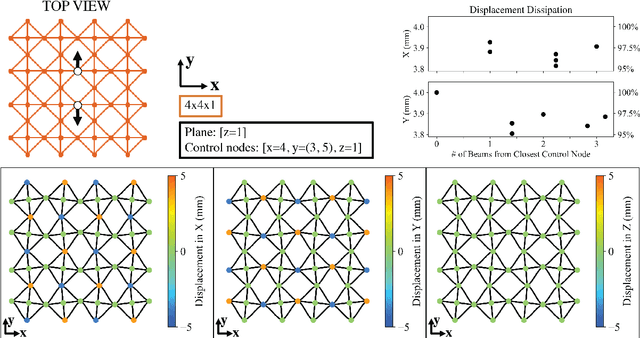
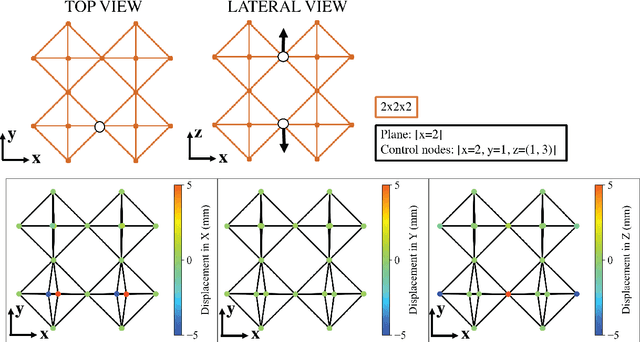
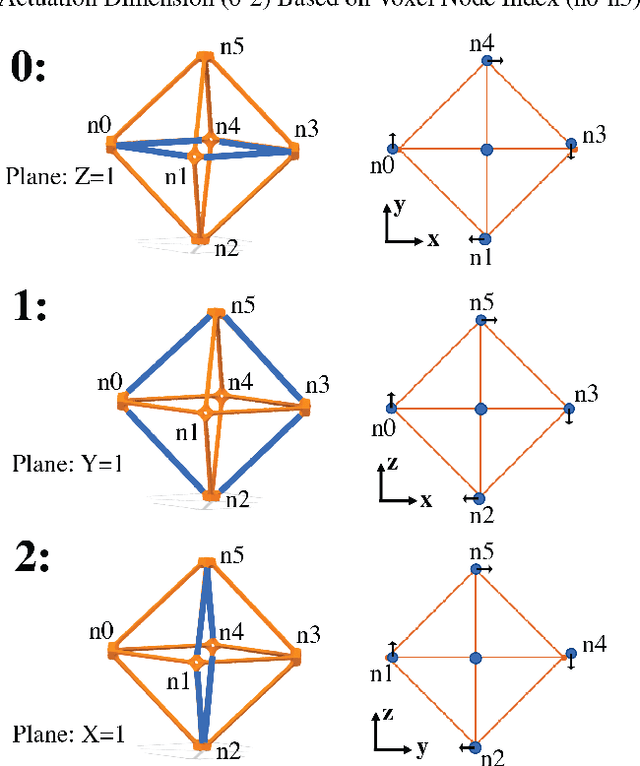
Voxel-based structures provide a modular, mechanically flexible periodic lattice which can be used as a soft robot through internal deformations. To engage these structures for robotic tasks, we use a finite element method to characterize the motion caused by deforming single degrees of freedom and develop a reduced kinematic model. We find that node translations propagate periodically along geometric planes within the lattice, and briefly show that translational modes dominate the energy usage of the actuators. The resulting kinematic model frames the structural deformations in terms of user-defined control and end effector nodes, which further reduces the model size. The derived Planes of Motion (POM) model can be equivalently used for forward and inverse kinematics, as demonstrated by the design of a tripod stable gait for a locomotive voxel robot and validation of the quasi-static model through physical experiments.
Low cost cloud based remote microscopy for biological sciences
Jun 07, 2021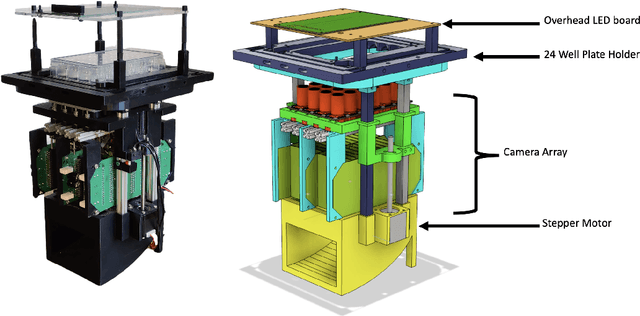
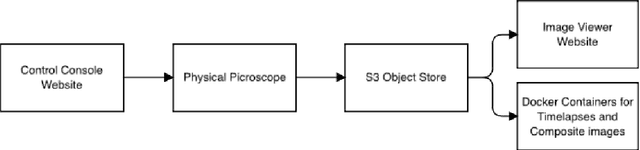
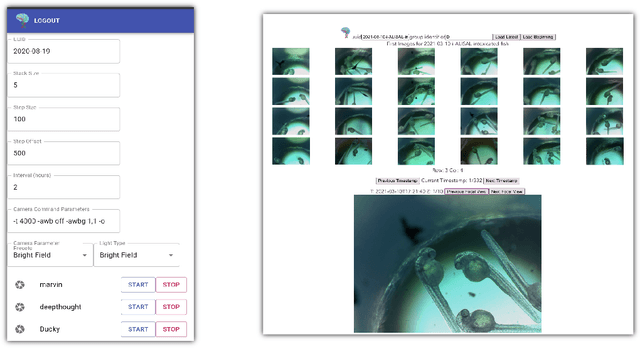
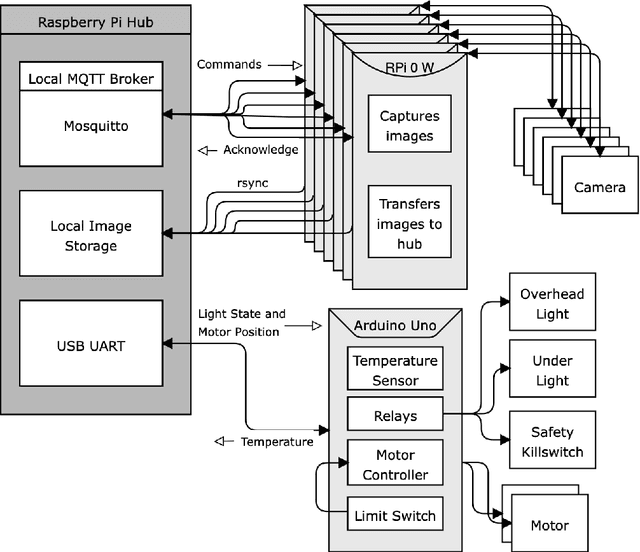
A low cost remote imaging platform for biological applications was developed. The "Picroscope" is a device that allows the user to perform longitudinal imaging studies on multi-well cell culture plates. Here we present the network architecture and software used to facilitate communication between modules within the device as well as external cloud services. A web based console was created to control the device and view experiment results. Post processing tools were developed to analyze captured data in the cloud. The result is a platform for controlling biological experiments from outside the lab.
The multi-channel potentiostat: Development and Evaluation of a Scalable Mini-Potentiostat array for investigating electrochemical reaction mechanisms
May 20, 2021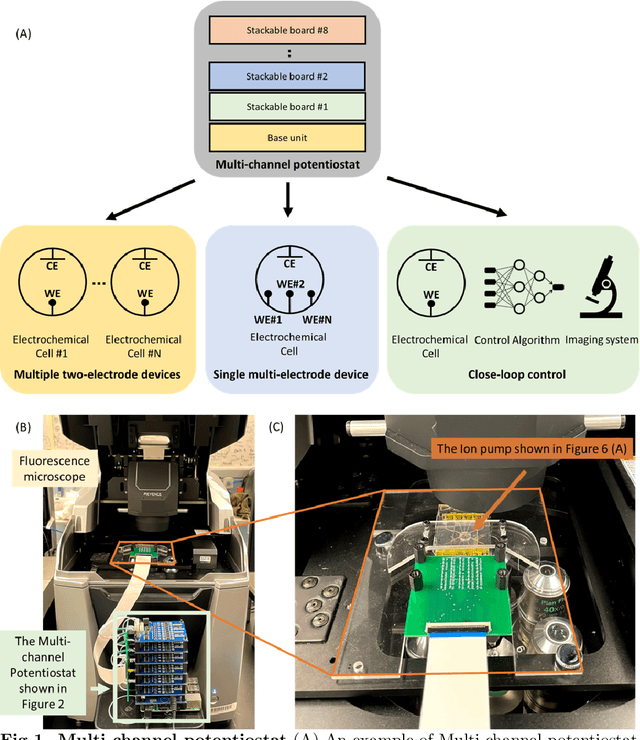
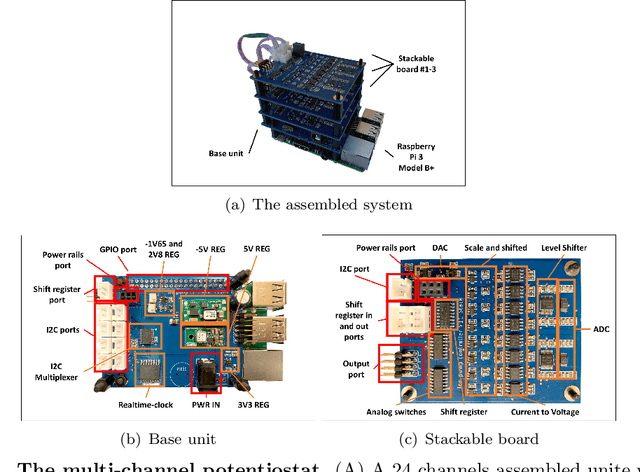
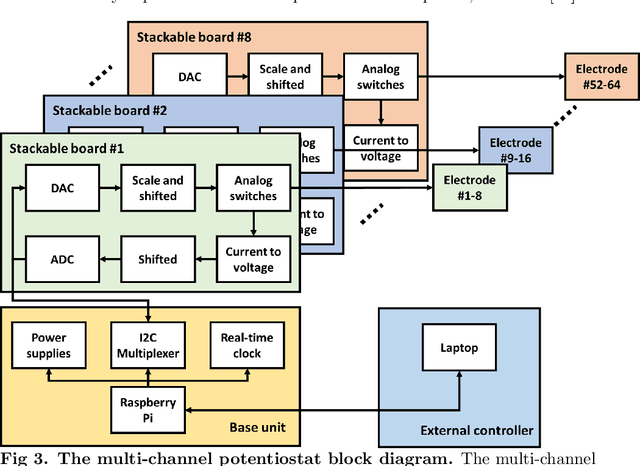
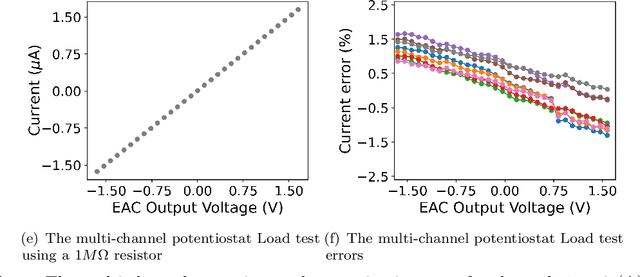
A potentiostat is an essential piece of analytical equipment for studying electrochemical devices and reactions. As the design of electrochemical devices evolve applications for systems with multiple working electrodes have become more common. These applications drive a need for low-cost multi-channel potentiostat systems. We have developed a portable low-cost scalable system with a modular design that can support 8 to 64 channels at a cost as low as \$8 per channel. This design can replace the functionality of commercial potentiostats which cost upwards of \$10k for certain applications. Each channel in the multi-channel potentiostat has an independent adjustable voltage source with a built-in ammeter and switch, making the device flexible for various configurations. The multi-channel potentiostat is designed for low current applications (nA range), but its purpose can change by varying its shunt resistor value. The system can either function as a standalone device or remotely controlled. We demonstrate the functionality of this system for the control of a 24-channel bioelectronic ion pump for open- and closed- loop control of pH.
Spiking neural state machine for gait frequency entrainment in a flexible modular robot
Jul 14, 2020



We propose a modular architecture for neuromorphic closed-loop control based on bistable relaxation oscillator modules consisting of three spiking neurons each. Like its biological prototypes, this basic component is robust to parameter variation but can be modulated by external inputs. By combining these modules, we can construct a neural state machine capable of generating the cyclic or repetitive behaviors necessary for legged locomotion. A concrete case study for the approach is provided by a modular robot constructed from flexible plastic volumetric pixels, in which we produce a forward crawling gait entrained to the natural frequency of the robot by a minimal system of twelve neurons organized into four modules.
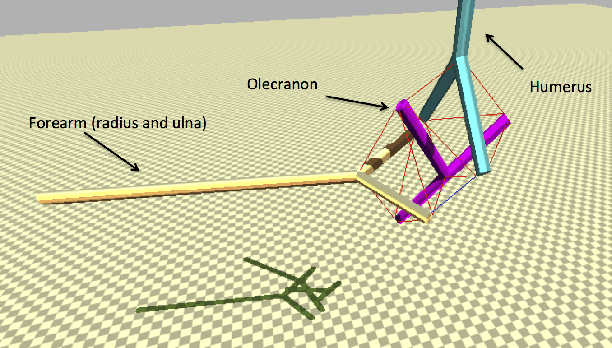
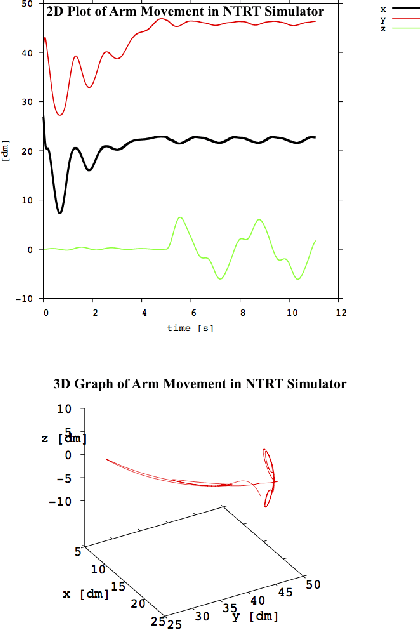
A Bio-Inspired Tensegrity Manipulator with Multi-DOF, Structurally Compliant Joints
Sep 01, 2016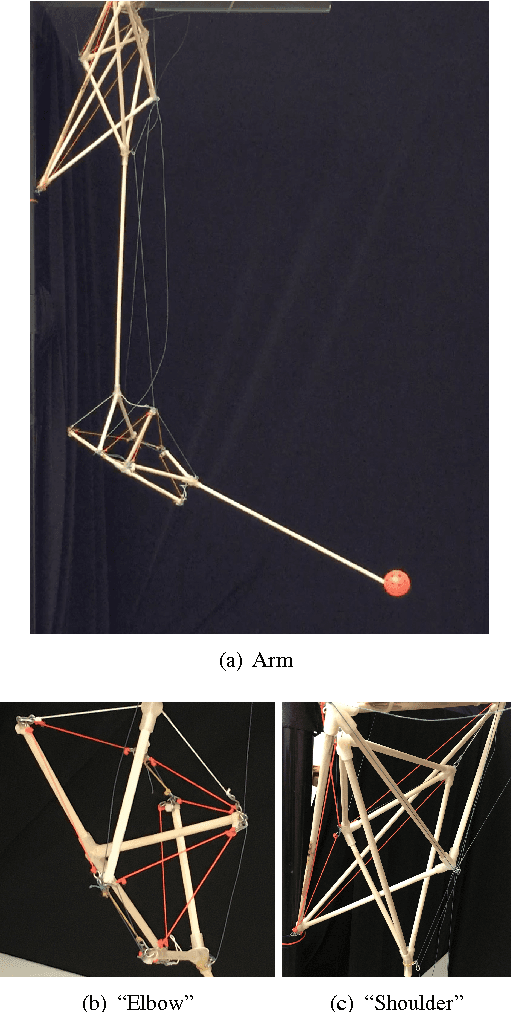
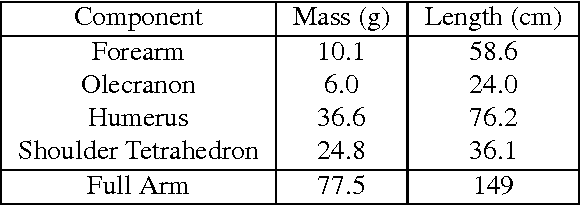

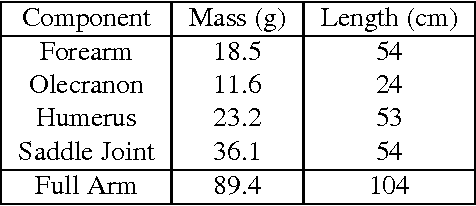
Most traditional robotic mechanisms feature inelastic joints that are unable to robustly handle large deformations and off-axis moments. As a result, the applied loads are transferred rigidly throughout the entire structure. The disadvantage of this approach is that the exerted leverage is magnified at each subsequent joint possibly damaging the mechanism. In this paper, we present two lightweight, elastic, bio-inspired tensegrity robotics arms which mitigate this danger while improving their mechanism's functionality. Our solutions feature modular tensegrity structures that function similarly to the human elbow and the human shoulder when connected. Like their biological counterparts, the proposed robotic joints are flexible and comply with unanticipated forces. Both proposed structures have multiple passive degrees of freedom and four active degrees of freedom (two from the shoulder and two from the elbow). The structural advantages demonstrated by the joints in these manipulators illustrate a solution to the fundamental issue of elegantly handling off-axis compliance.
A light-weight, multi-axis compliant tensegrity joint
Oct 26, 2015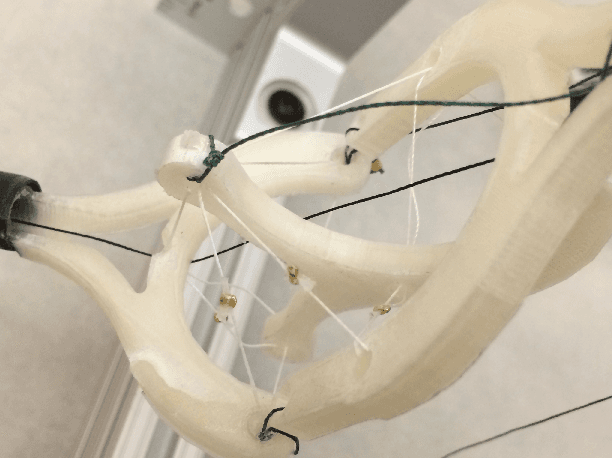
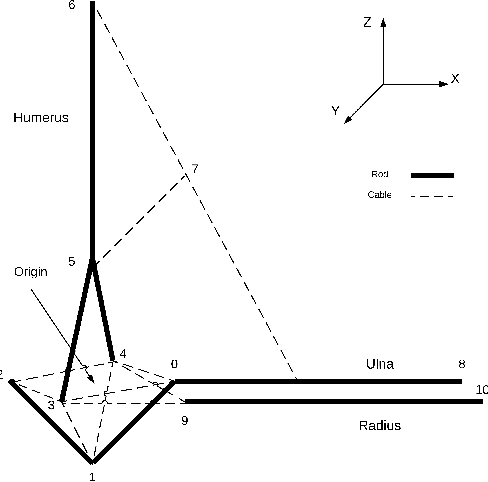
In this paper, we present a light-weight, multi- axis compliant tenegrity joint that is biologically inspired by the human elbow. This tensegrity elbow actuates by shortening and lengthening cable in a method inspired by muscular actuation in a person. Unlike many series elastic actuators, this joint is structurally compliant not just along each axis of rotation, but along other axes as well. Compliant robotic joints are indispensable in unpredictable environments, including ones where the robot must interface with a person. The joint also addresses the need for functional redundancy and flexibility, traits which are required for many applications that investigate the use of biologically accurate robotic models.