 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow cost cloud based remote microscopy for biological sciences
Jun 07, 2021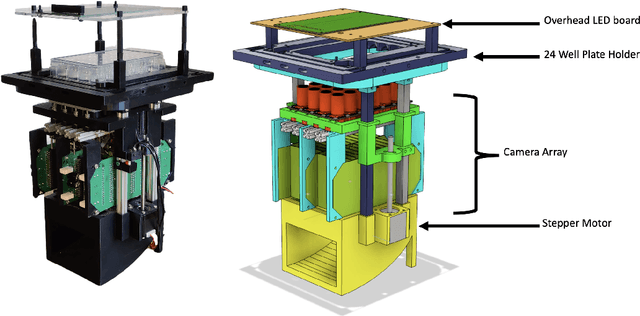
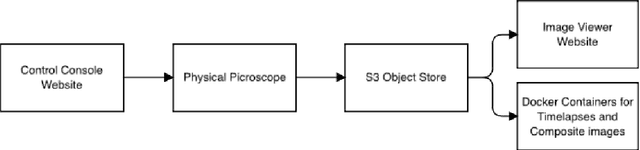
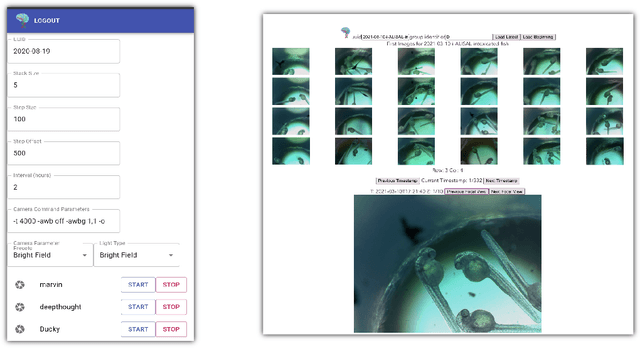
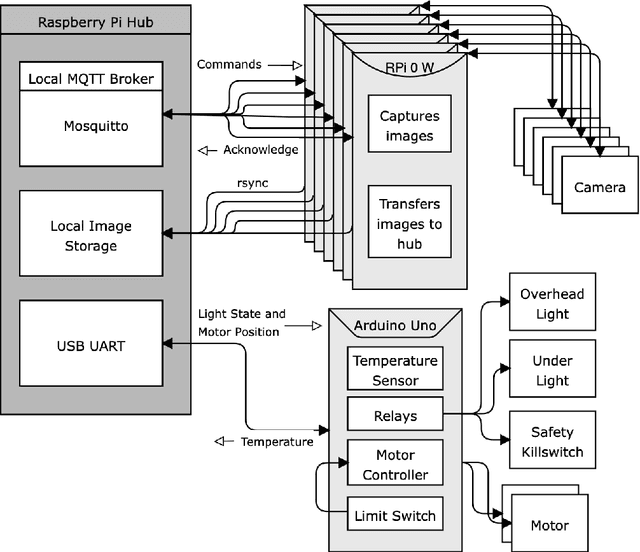
A low cost remote imaging platform for biological applications was developed. The "Picroscope" is a device that allows the user to perform longitudinal imaging studies on multi-well cell culture plates. Here we present the network architecture and software used to facilitate communication between modules within the device as well as external cloud services. A web based console was created to control the device and view experiment results. Post processing tools were developed to analyze captured data in the cloud. The result is a platform for controlling biological experiments from outside the lab.
Spiking neural state machine for gait frequency entrainment in a flexible modular robot
Jul 14, 2020



We propose a modular architecture for neuromorphic closed-loop control based on bistable relaxation oscillator modules consisting of three spiking neurons each. Like its biological prototypes, this basic component is robust to parameter variation but can be modulated by external inputs. By combining these modules, we can construct a neural state machine capable of generating the cyclic or repetitive behaviors necessary for legged locomotion. A concrete case study for the approach is provided by a modular robot constructed from flexible plastic volumetric pixels, in which we produce a forward crawling gait entrained to the natural frequency of the robot by a minimal system of twelve neurons organized into four modules.