 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bio-Inspired Tensegrity Manipulator with Multi-DOF, Structurally Compliant Joints
Sep 01, 2016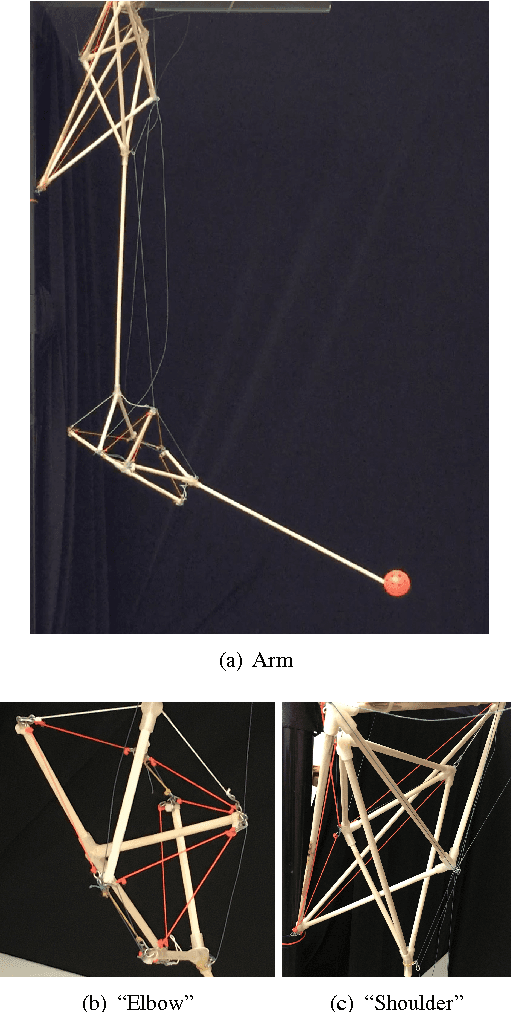

Most traditional robotic mechanisms feature inelastic joints that are unable to robustly handle large deformations and off-axis moments. As a result, the applied loads are transferred rigidly throughout the entire structure. The disadvantage of this approach is that the exerted leverage is magnified at each subsequent joint possibly damaging the mechanism. In this paper, we present two lightweight, elastic, bio-inspired tensegrity robotics arms which mitigate this danger while improving their mechanism's functionality. Our solutions feature modular tensegrity structures that function similarly to the human elbow and the human shoulder when connected. Like their biological counterparts, the proposed robotic joints are flexible and comply with unanticipated forces. Both proposed structures have multiple passive degrees of freedom and four active degrees of freedom (two from the shoulder and two from the elbow). The structural advantages demonstrated by the joints in these manipulators illustrate a solution to the fundamental issue of elegantly handling off-axis compliance.
A light-weight, multi-axis compliant tensegrity joint
Oct 26, 2015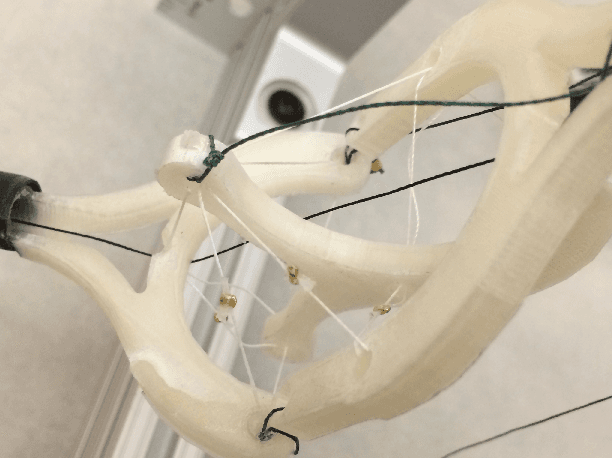
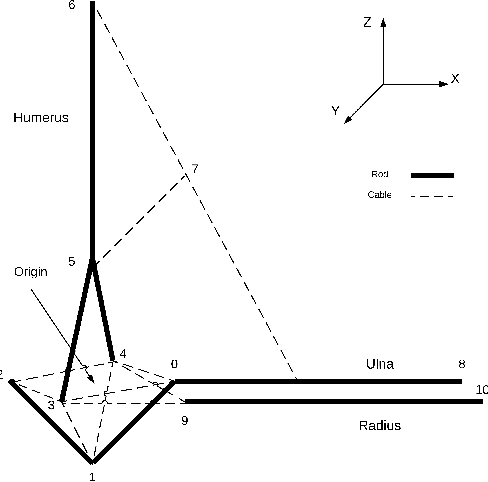
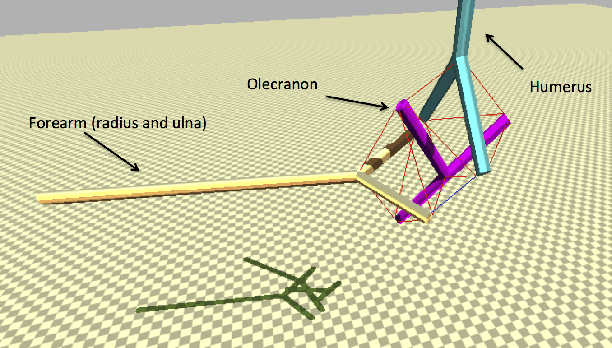
In this paper, we present a light-weight, multi- axis compliant tenegrity joint that is biologically inspired by the human elbow. This tensegrity elbow actuates by shortening and lengthening cable in a method inspired by muscular actuation in a person. Unlike many series elastic actuators, this joint is structurally compliant not just along each axis of rotation, but along other axes as well. Compliant robotic joints are indispensable in unpredictable environments, including ones where the robot must interface with a person. The joint also addresses the need for functional redundancy and flexibility, traits which are required for many applications that investigate the use of biologically accurate robotic models.