 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExAgt: Expert-guided Augmentation for Representation Learning of Traffic Scenarios
Jul 20, 2022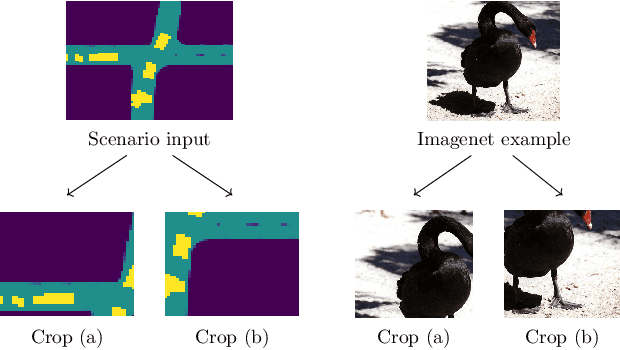
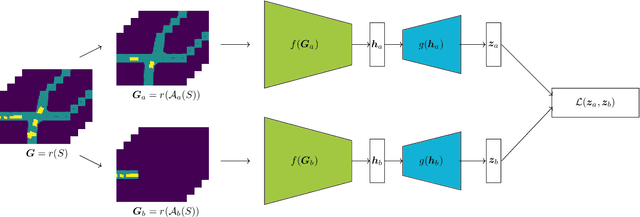
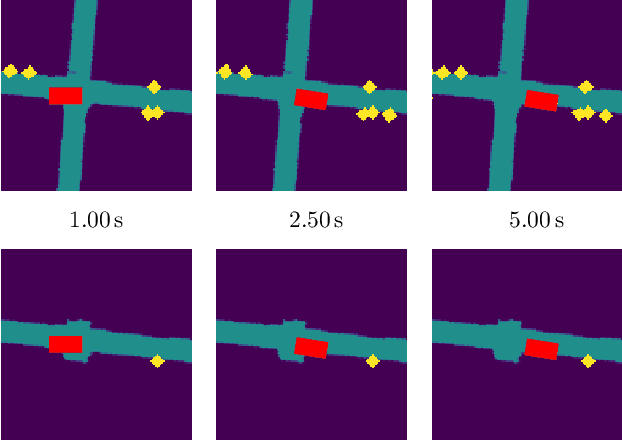
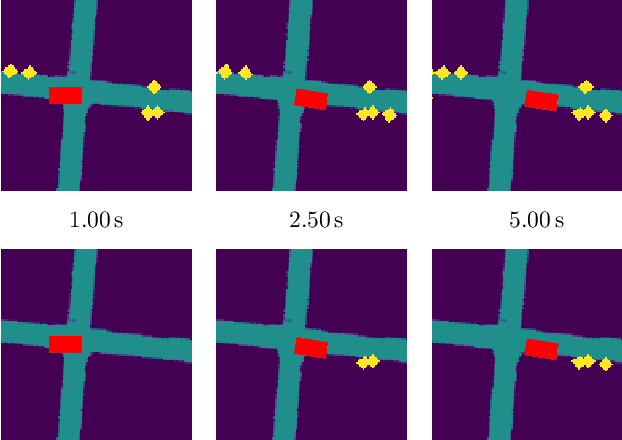
Representation learning in recent years has been addressed with self-supervised learning methods. The input data is augmented into two distorted views and an encoder learns the representations that are invariant to distortions -- cross-view prediction. Augmentation is one of the key components in cross-view self-supervised learning frameworks to learn visual representations. This paper presents ExAgt, a novel method to include expert knowledge for augmenting traffic scenarios, to improve the learnt representations without any human annotation. The expert-guided augmentations are generated in an automated fashion based on the infrastructure, the interactions between the EGO and the traffic participants and an ideal sensor model. The ExAgt method is applied in two state-of-the-art cross-view prediction methods and the representations learnt are tested in downstream tasks like classification and clustering. Results show that the ExAgt method improves representation learning compared to using only standard augmentations and it provides a better representation space stability. The code is available at https://github.com/lab176344/ExAgt.
Expert-LaSTS: Expert-Knowledge Guided Latent Space for Traffic Scenarios
Jul 20, 2022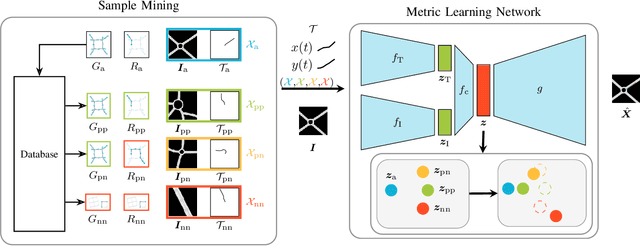


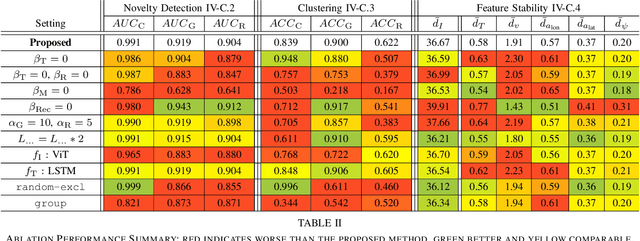
Clustering traffic scenarios and detecting novel scenario types are required for scenario-based testing of autonomous vehicles. These tasks benefit from either good similarity measures or good representations for the traffic scenarios. In this work, an expert-knowledge aided representation learning for traffic scenarios is presented. The latent space so formed is used for successful clustering and novel scenario type detection. Expert-knowledge is used to define objectives that the latent representations of traffic scenarios shall fulfill. It is presented, how the network architecture and loss is designed from these objectives, thereby incorporating expert-knowledge. An automatic mining strategy for traffic scenarios is presented, such that no manual labeling is required. Results show the performance advantage compared to baseline methods. Additionally, extensive analysis of the latent space is performed.
* Copyright 2022 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Traffic Scenario Clustering by Iterative Optimisation of Self-Supervised Networks Using a Random Forest Activation Pattern Similarity
May 17, 2021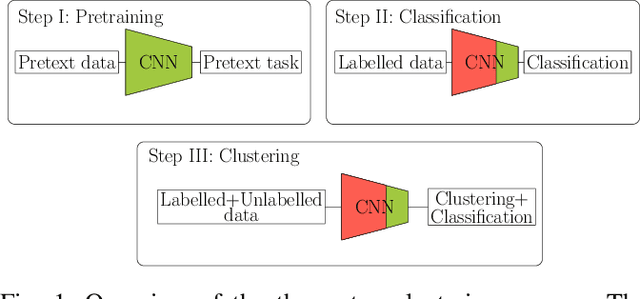
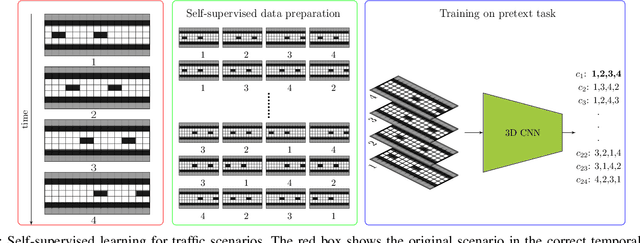
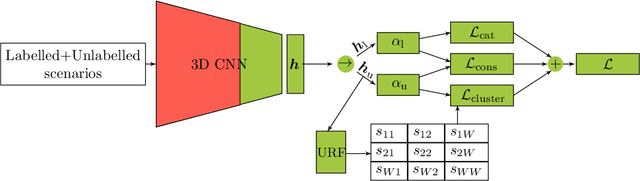
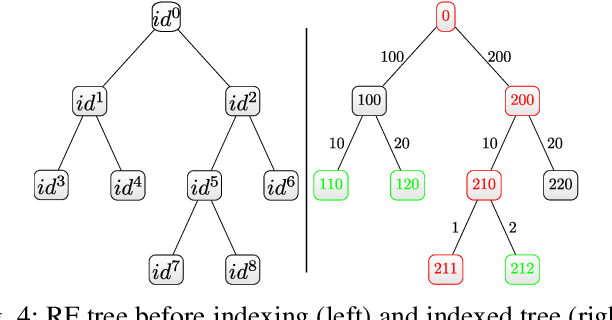
Traffic scenario categorisation is an essential component of automated driving, for e.\,g., in motion planning algorithms and their validation. Finding new relevant scenarios without handcrafted steps reduce the required resources for the development of autonomous driving dramatically. In this work, a method is proposed to address this challenge by introducing a clustering technique based on a novel data-adaptive similarity measure, called Random Forest Activation Pattern (RFAP) similarity. The RFAP similarity is generated using a tree encoding scheme in a Random Forest algorithm. The clustering method proposed in this work takes into account that there are labelled scenarios available and the information from the labelled scenarios can help to guide the clustering of unlabelled scenarios. It consists of three steps. First, a self-supervised Convolutional Neural Network~(CNN) is trained on all available traffic scenarios using a defined self-supervised objective. Second, the CNN is fine-tuned for classification of the labelled scenarios. Third, using the labelled and unlabelled scenarios an iterative optimisation procedure is performed for clustering. In the third step at each epoch of the iterative optimisation, the CNN is used as a feature generator for an unsupervised Random Forest. The trained forest, in turn, provides the RFAP similarity to adapt iteratively the feature generation process implemented by the CNN. Extensive experiments and ablation studies have been done on the highD dataset. The proposed method shows superior performance compared to baseline clustering techniques.
Novelty Detection and Analysis of Traffic Scenario Infrastructures in the Latent Space of a Vision Transformer-Based Triplet Autoencoder
May 05, 2021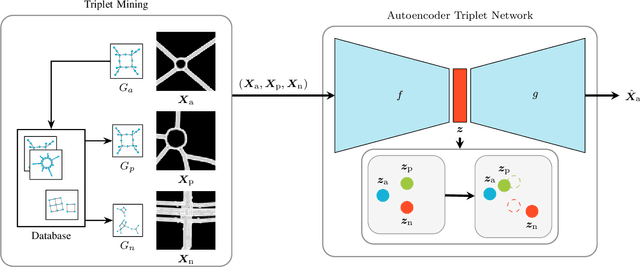
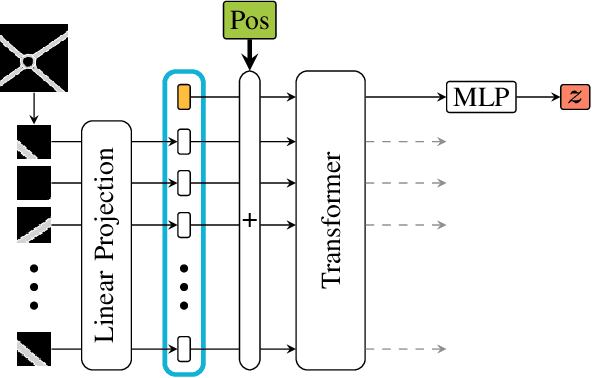
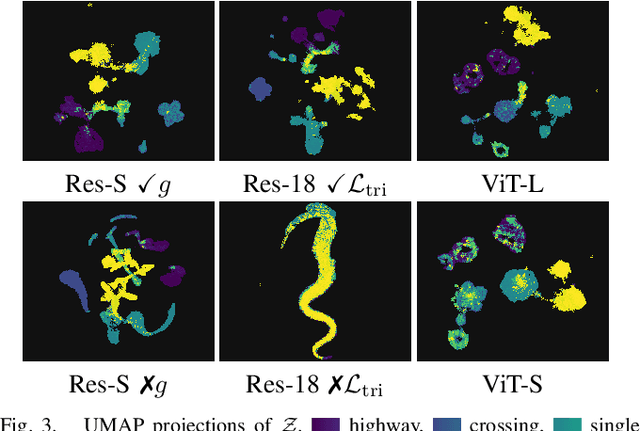
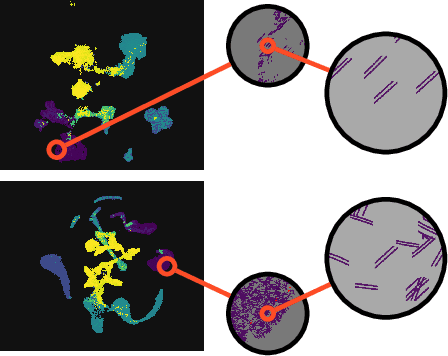
Detecting unknown and untested scenarios is crucial for scenario-based testing. Scenario-based testing is considered to be a possible approach to validate autonomous vehicles. A traffic scenario consists of multiple components, with infrastructure being one of it. In this work, a method to detect novel traffic scenarios based on their infrastructure images is presented. An autoencoder triplet network provides latent representations for infrastructure images which are used for outlier detection. The triplet training of the network is based on the connectivity graphs of the infrastructure. By using the proposed architecture, expert-knowledge is used to shape the latent space such that it incorporates a pre-defined similarity in the neighborhood relationships of an autoencoder. An ablation study on the architecture is highlighting the importance of the triplet autoencoder combination. The best performing architecture is based on vision transformers, a convolution-free attention-based network. The presented method outperforms other state-of-the-art outlier detection approaches.
An Entropy Based Outlier Score and its Application to Novelty Detection for Road Infrastructure Images
May 27, 2020


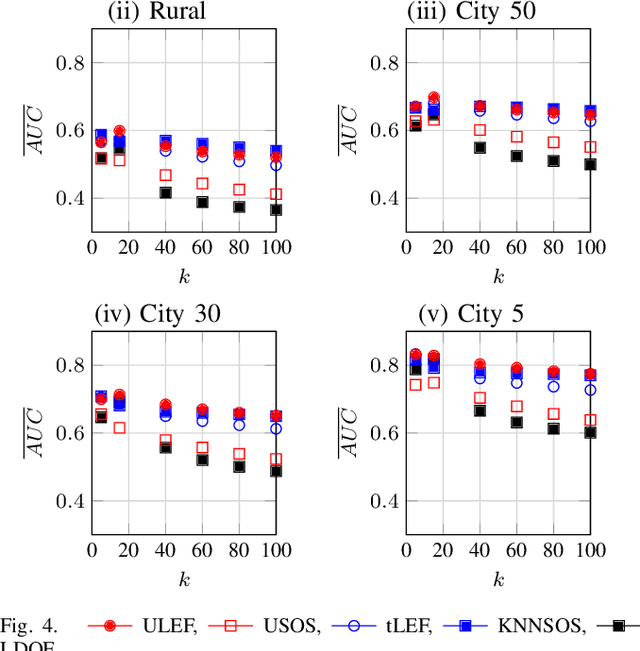
A novel unsupervised outlier score, which can be embedded into graph based dimensionality reduction techniques, is presented in this work. The score uses the directed nearest neighbor graphs of those techniques. Hence, the same measure of similarity that is used to project the data into lower dimensions, is also utilized to determine the outlier score. The outlier score is realized through a weighted normalized entropy of the similarities. This score is applied to road infrastructure images. The aim is to identify newly observed infrastructures given a pre-collected base dataset. Detecting unknown scenarios is a key for accelerated validation of autonomous vehicles. The results show the high potential of the proposed technique. To validate the generalization capabilities of the outlier score, it is additionally applied to various real world datasets. The overall average performance in identifying outliers using the proposed methods is higher compared to state-of-the-art methods. In order to generate the infrastructure images, an openDRIVE parsing and plotting tool for Matlab is developed as part of this work. This tool and the implementation of the entropy based outlier score in combination with Uniform Manifold Approximation and Projection are made publicly available.
* Copyright 20xx IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Unsupervised and Supervised Learning with the Random Forest Algorithm for Traffic Scenario Clustering and Classification
Apr 05, 2020
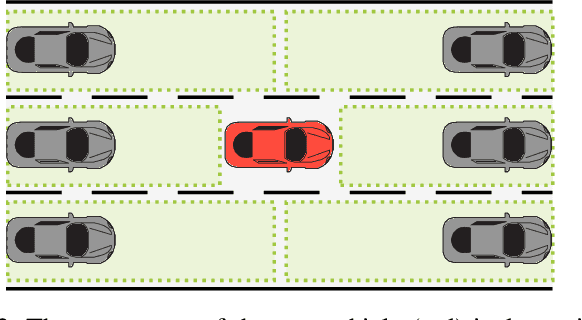
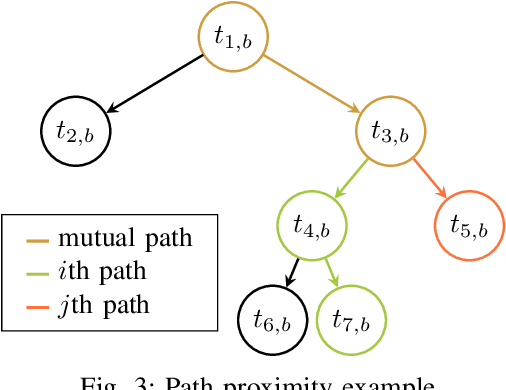

The goal of this paper is to provide a method, which is able to find categories of traffic scenarios automatically. The architecture consists of three main components: A microscopic traffic simulation, a clustering technique and a classification technique for the operational phase. The developed simulation tool models each vehicle separately, while maintaining the dependencies between each other. The clustering approach consists of a modified unsupervised Random Forest algorithm to find a data adaptive similarity measure between all scenarios. As part of this, the path proximity, a novel technique to determine a similarity based on the Random Forest algorithm is presented. In the second part of the clustering, the similarities are used to define a set of clusters. In the third part, a Random Forest classifier is trained using the defined clusters for the operational phase. A thresholding technique is described to ensure a certain confidence level for the class assignment. The method is applied for highway scenarios. The results show that the proposed method is an excellent approach to automatically categorize traffic scenarios, which is particularly relevant for testing autonomous vehicle functionality.
* Copyright 20xx IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
An Unsupervised Random Forest Clustering Technique for Automatic Traffic Scenario Categorization
Apr 05, 2020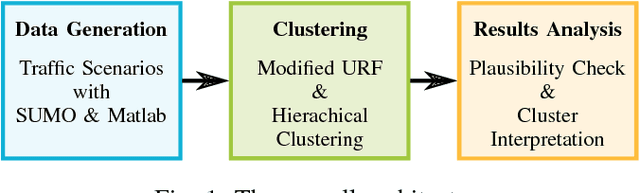

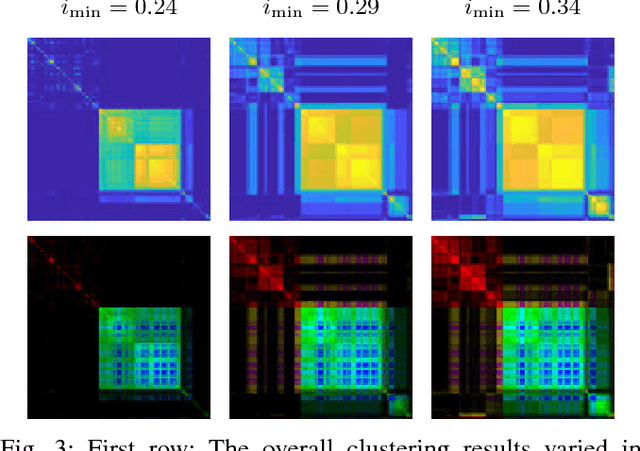
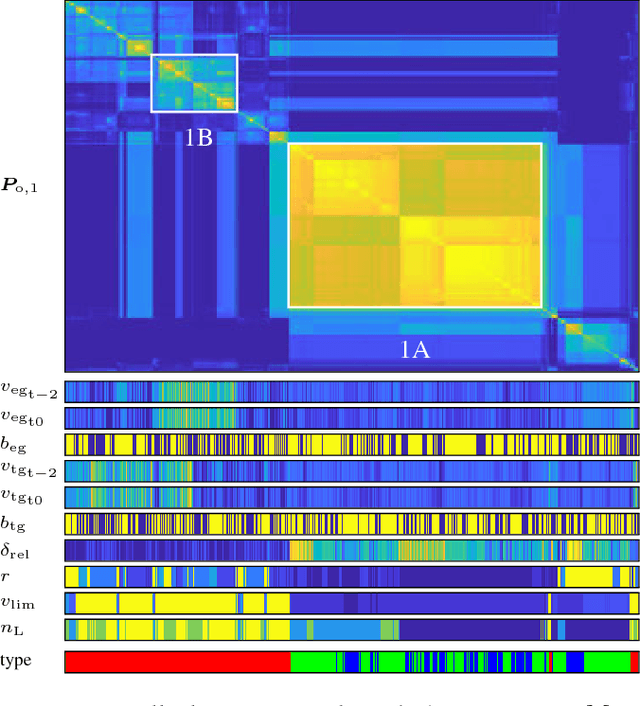
A modification of the Random Forest algorithm for the categorization of traffic situations is introduced in this paper. The procedure yields an unsupervised machine learning method. The algorithm generates a proximity matrix which contains a similarity measure. This matrix is then reordered with hierarchical clustering to achieve a graphically interpretable representation. It is shown how the resulting proximity matrix can be visually interpreted and how the variation of the methods' metaparameter reveals different insights into the data. The proposed method is able to cluster data from any data source. To demonstrate the methods' potential, multiple features derived from a traffic simulation are used in this paper. The knowledge of traffic scenario clusters is crucial to accelerate the validation process. The clue of the method is that scenario templates can be generated automatically from actual traffic situations. These templates can be employed in all stages of the development process. The results prove that the procedure is well suited for an automatic categorization of traffic scenarios. Diverse other applications can benefit from this work.
* Copyright 20xx IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works