 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-set Recognition based on the Combination of Deep Learning and Ensemble Method for Detecting Unknown Traffic Scenarios
May 17, 2021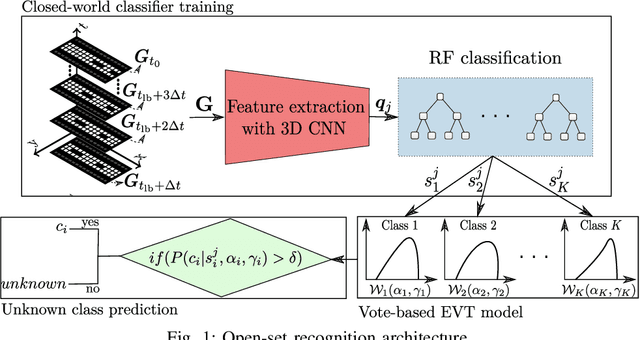
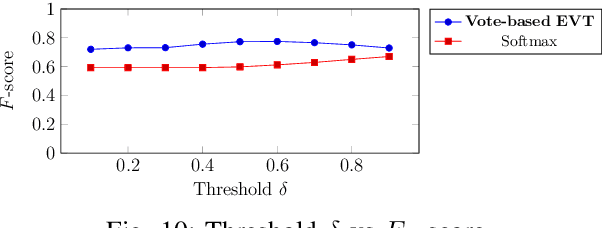


An understanding and classification of driving scenarios are important for testing and development of autonomous driving functionalities. Machine learning models are useful for scenario classification but most of them assume that data received during the testing are from one of the classes used in the training. This assumption is not true always because of the open environment where vehicles operate. This is addressed by a new machine learning paradigm called open-set recognition. Open-set recognition is the problem of assigning test samples to one of the classes used in training or to an unknown class. This work proposes a combination of Convolutional Neural Networks (CNN) and Random Forest (RF) for open set recognition of traffic scenarios. CNNs are used for the feature generation and the RF algorithm along with extreme value theory for the detection of known and unknown classes. The proposed solution is featured by exploring the vote patterns of trees in RF instead of just majority voting. By inheriting the ensemble nature of RF, the vote pattern of all trees combined with extreme value theory is shown to be well suited for detecting unknown classes. The proposed method has been tested on the highD and OpenTraffic datasets and has demonstrated superior performance in various aspects compared to existing solutions.
Vehicle Position Estimation with Aerial Imagery from Unmanned Aerial Vehicles
May 13, 2020



The availability of real-world data is a key element for novel developments in the fields of automotive and traffic research. Aerial imagery has the major advantage of recording multiple objects simultaneously and overcomes limitations such as occlusions. However, there are only few data sets available. This work describes a process to estimate a precise vehicle position from aerial imagery. A robust object detection is crucial for reliable results, hence the state-of-the-art deep neural network Mask-RCNN is applied for that purpose. Two training data sets are employed: The first one is optimized for detecting the test vehicle, while the second one consists of randomly selected images recorded on public roads. To reduce errors, several aspects are accounted for, such as the drone movement and the perspective projection from a photograph. The estimated position is comapared with a reference system installed in the test vehicle. It is shown, that a mean accuracy of 20 cm can be achieved with flight altitudes up to 100 m, Full-HD resolution and a frame-by-frame detection. A reliable position estimation is the basis for further data processing, such as obtaining additional vehicle state variables. The source code, training weights, labeled data and example videos are made publicly available. This supports researchers to create new traffic data sets with specific local conditions.
* Copyright 20xx IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Unsupervised and Supervised Learning with the Random Forest Algorithm for Traffic Scenario Clustering and Classification
Apr 05, 2020
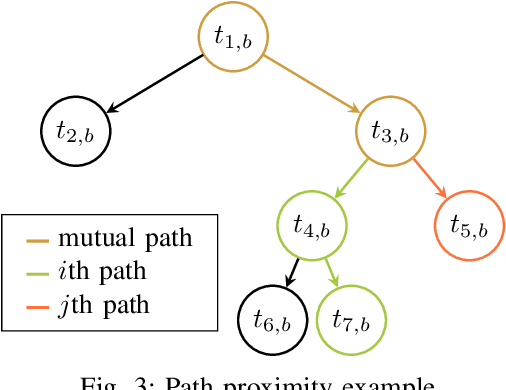

The goal of this paper is to provide a method, which is able to find categories of traffic scenarios automatically. The architecture consists of three main components: A microscopic traffic simulation, a clustering technique and a classification technique for the operational phase. The developed simulation tool models each vehicle separately, while maintaining the dependencies between each other. The clustering approach consists of a modified unsupervised Random Forest algorithm to find a data adaptive similarity measure between all scenarios. As part of this, the path proximity, a novel technique to determine a similarity based on the Random Forest algorithm is presented. In the second part of the clustering, the similarities are used to define a set of clusters. In the third part, a Random Forest classifier is trained using the defined clusters for the operational phase. A thresholding technique is described to ensure a certain confidence level for the class assignment. The method is applied for highway scenarios. The results show that the proposed method is an excellent approach to automatically categorize traffic scenarios, which is particularly relevant for testing autonomous vehicle functionality.
* Copyright 20xx IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
An Unsupervised Random Forest Clustering Technique for Automatic Traffic Scenario Categorization
Apr 05, 2020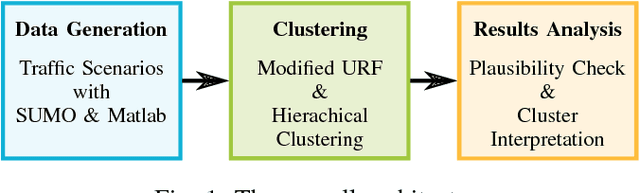

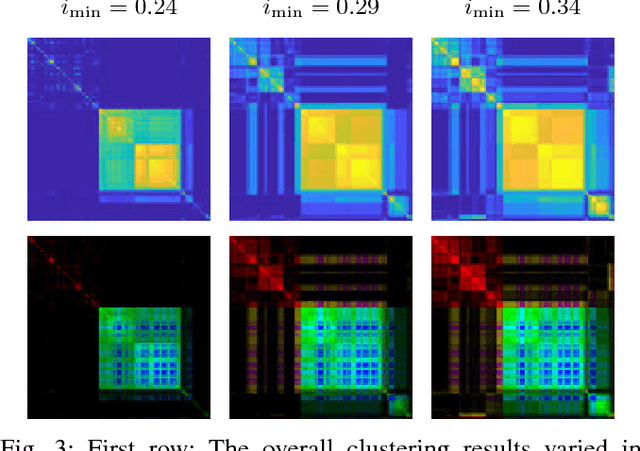
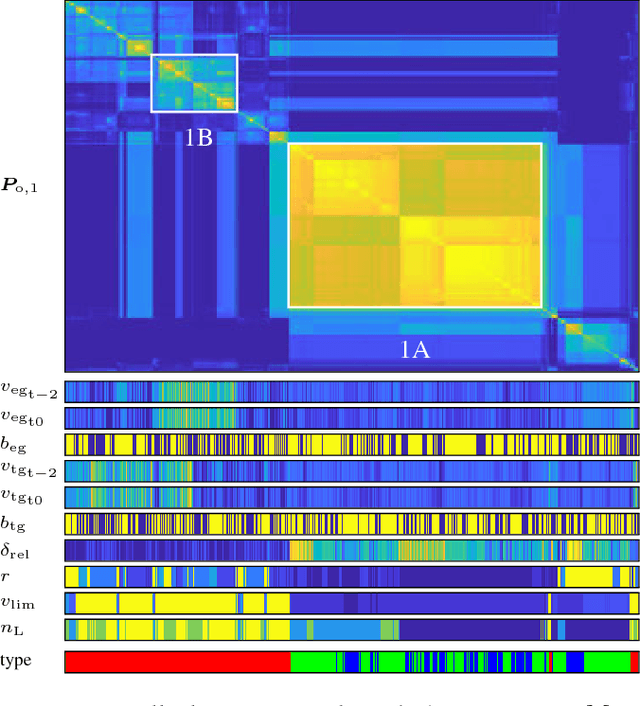
A modification of the Random Forest algorithm for the categorization of traffic situations is introduced in this paper. The procedure yields an unsupervised machine learning method. The algorithm generates a proximity matrix which contains a similarity measure. This matrix is then reordered with hierarchical clustering to achieve a graphically interpretable representation. It is shown how the resulting proximity matrix can be visually interpreted and how the variation of the methods' metaparameter reveals different insights into the data. The proposed method is able to cluster data from any data source. To demonstrate the methods' potential, multiple features derived from a traffic simulation are used in this paper. The knowledge of traffic scenario clusters is crucial to accelerate the validation process. The clue of the method is that scenario templates can be generated automatically from actual traffic situations. These templates can be employed in all stages of the development process. The results prove that the procedure is well suited for an automatic categorization of traffic scenarios. Diverse other applications can benefit from this work.
* Copyright 20xx IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works