 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerson Re-ID in 2025: Supervised, Self-Supervised, and Language-Aligned. What Works?
Jan 28, 2026Person Re-Identification (ReID) remains a challenging problem in computer vision. This work reviews various training paradigm and evaluates the robustness of state-of-the-art ReID models in cross-domain applications and examines the role of foundation models in improving generalization through richer, more transferable visual representations. We compare three training paradigms, supervised, self-supervised, and language-aligned models. Through the study the aim is to answer the following questions: Can supervised models generalize in cross-domain scenarios? How does foundation models like SigLIP2 perform for the ReID tasks? What are the weaknesses of current supervised and foundational models for ReID? We have conducted the analysis across 11 models and 9 datasets. Our results show a clear split: supervised models dominate their training domain but crumble on cross-domain data. Language-aligned models, however, show surprising robustness cross-domain for ReID tasks, even though they are not explicitly trained to do so. Code and data available at: https://github.com/moiiai-tech/object-reid-benchmark.
Hybrid Machine Learning Model with a Constrained Action Space for Trajectory Prediction
Jan 07, 2025Trajectory prediction is crucial to advance autonomous driving, improving safety, and efficiency. Although end-to-end models based on deep learning have great potential, they often do not consider vehicle dynamic limitations, leading to unrealistic predictions. To address this problem, this work introduces a novel hybrid model that combines deep learning with a kinematic motion model. It is able to predict object attributes such as acceleration and yaw rate and generate trajectories based on them. A key contribution is the incorporation of expert knowledge into the learning objective of the deep learning model. This results in the constraint of the available action space, thus enabling the prediction of physically feasible object attributes and trajectories, thereby increasing safety and robustness. The proposed hybrid model facilitates enhanced interpretability, thereby reinforcing the trustworthiness of deep learning methods and promoting the development of safe planning solutions. Experiments conducted on the publicly available real-world Argoverse dataset demonstrate realistic driving behaviour, with benchmark comparisons and ablation studies showing promising results.
ExAgt: Expert-guided Augmentation for Representation Learning of Traffic Scenarios
Jul 20, 2022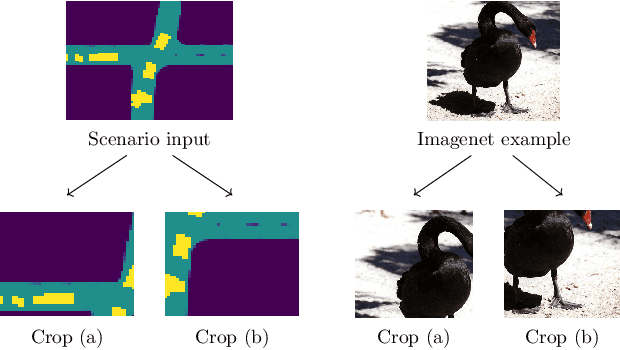
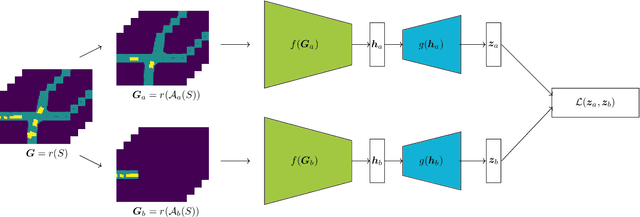
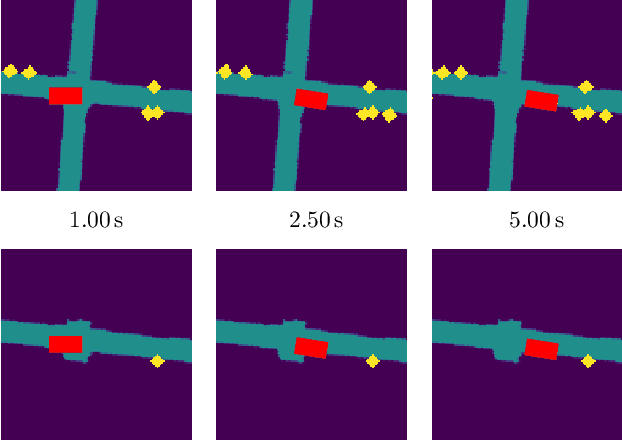
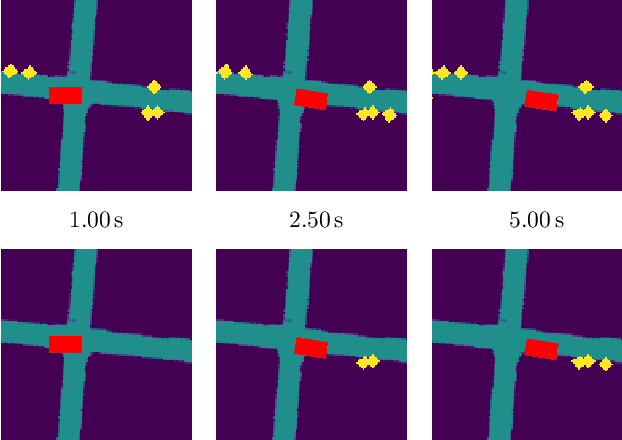
Representation learning in recent years has been addressed with self-supervised learning methods. The input data is augmented into two distorted views and an encoder learns the representations that are invariant to distortions -- cross-view prediction. Augmentation is one of the key components in cross-view self-supervised learning frameworks to learn visual representations. This paper presents ExAgt, a novel method to include expert knowledge for augmenting traffic scenarios, to improve the learnt representations without any human annotation. The expert-guided augmentations are generated in an automated fashion based on the infrastructure, the interactions between the EGO and the traffic participants and an ideal sensor model. The ExAgt method is applied in two state-of-the-art cross-view prediction methods and the representations learnt are tested in downstream tasks like classification and clustering. Results show that the ExAgt method improves representation learning compared to using only standard augmentations and it provides a better representation space stability. The code is available at https://github.com/lab176344/ExAgt.
Expert-LaSTS: Expert-Knowledge Guided Latent Space for Traffic Scenarios
Jul 20, 2022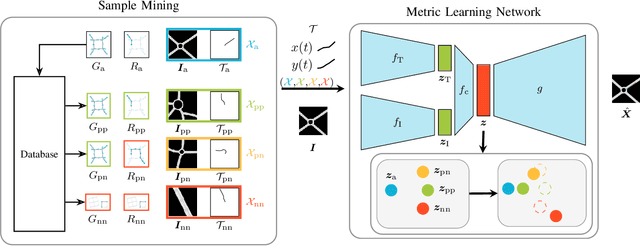


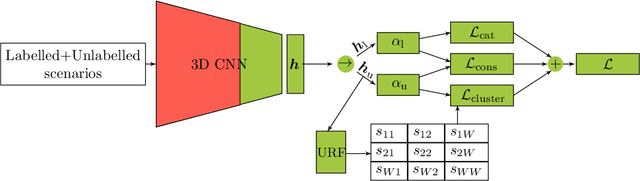
Clustering traffic scenarios and detecting novel scenario types are required for scenario-based testing of autonomous vehicles. These tasks benefit from either good similarity measures or good representations for the traffic scenarios. In this work, an expert-knowledge aided representation learning for traffic scenarios is presented. The latent space so formed is used for successful clustering and novel scenario type detection. Expert-knowledge is used to define objectives that the latent representations of traffic scenarios shall fulfill. It is presented, how the network architecture and loss is designed from these objectives, thereby incorporating expert-knowledge. An automatic mining strategy for traffic scenarios is presented, such that no manual labeling is required. Results show the performance advantage compared to baseline methods. Additionally, extensive analysis of the latent space is performed.
* Copyright 2022 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Traffic Scenario Clustering by Iterative Optimisation of Self-Supervised Networks Using a Random Forest Activation Pattern Similarity
May 17, 2021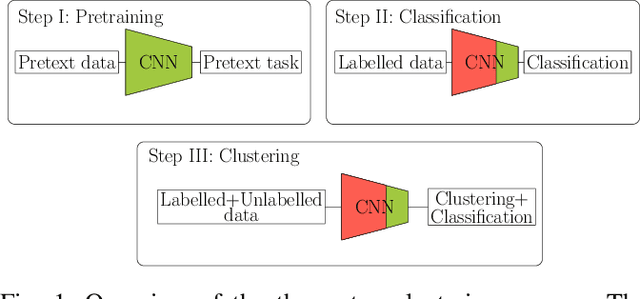
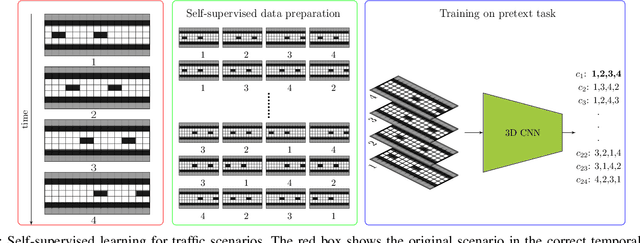
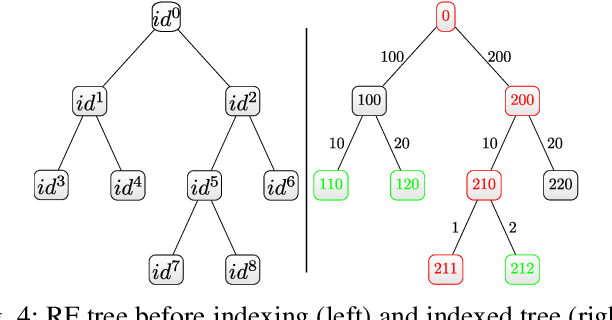
Traffic scenario categorisation is an essential component of automated driving, for e.\,g., in motion planning algorithms and their validation. Finding new relevant scenarios without handcrafted steps reduce the required resources for the development of autonomous driving dramatically. In this work, a method is proposed to address this challenge by introducing a clustering technique based on a novel data-adaptive similarity measure, called Random Forest Activation Pattern (RFAP) similarity. The RFAP similarity is generated using a tree encoding scheme in a Random Forest algorithm. The clustering method proposed in this work takes into account that there are labelled scenarios available and the information from the labelled scenarios can help to guide the clustering of unlabelled scenarios. It consists of three steps. First, a self-supervised Convolutional Neural Network~(CNN) is trained on all available traffic scenarios using a defined self-supervised objective. Second, the CNN is fine-tuned for classification of the labelled scenarios. Third, using the labelled and unlabelled scenarios an iterative optimisation procedure is performed for clustering. In the third step at each epoch of the iterative optimisation, the CNN is used as a feature generator for an unsupervised Random Forest. The trained forest, in turn, provides the RFAP similarity to adapt iteratively the feature generation process implemented by the CNN. Extensive experiments and ablation studies have been done on the highD dataset. The proposed method shows superior performance compared to baseline clustering techniques.
Open-set Recognition based on the Combination of Deep Learning and Ensemble Method for Detecting Unknown Traffic Scenarios
May 17, 2021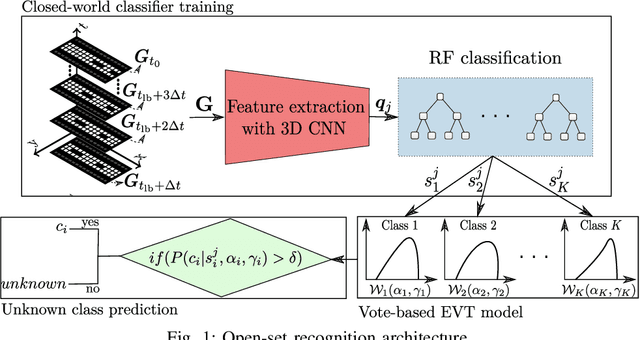
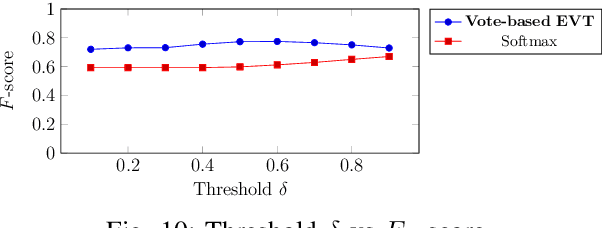


An understanding and classification of driving scenarios are important for testing and development of autonomous driving functionalities. Machine learning models are useful for scenario classification but most of them assume that data received during the testing are from one of the classes used in the training. This assumption is not true always because of the open environment where vehicles operate. This is addressed by a new machine learning paradigm called open-set recognition. Open-set recognition is the problem of assigning test samples to one of the classes used in training or to an unknown class. This work proposes a combination of Convolutional Neural Networks (CNN) and Random Forest (RF) for open set recognition of traffic scenarios. CNNs are used for the feature generation and the RF algorithm along with extreme value theory for the detection of known and unknown classes. The proposed solution is featured by exploring the vote patterns of trees in RF instead of just majority voting. By inheriting the ensemble nature of RF, the vote pattern of all trees combined with extreme value theory is shown to be well suited for detecting unknown classes. The proposed method has been tested on the highD and OpenTraffic datasets and has demonstrated superior performance in various aspects compared to existing solutions.
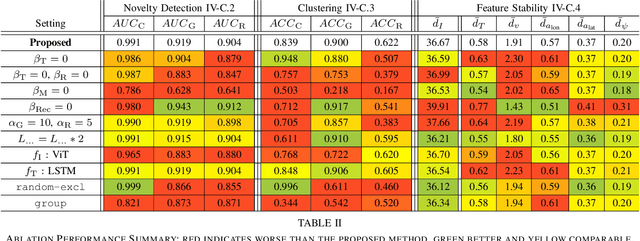
Novelty Detection and Analysis of Traffic Scenario Infrastructures in the Latent Space of a Vision Transformer-Based Triplet Autoencoder
May 05, 2021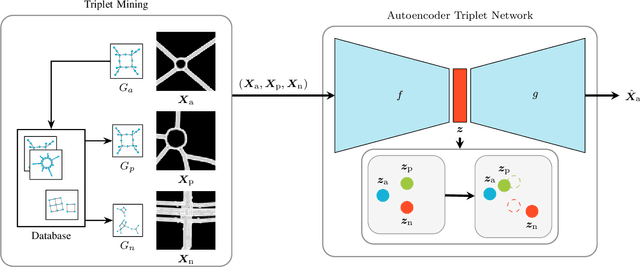
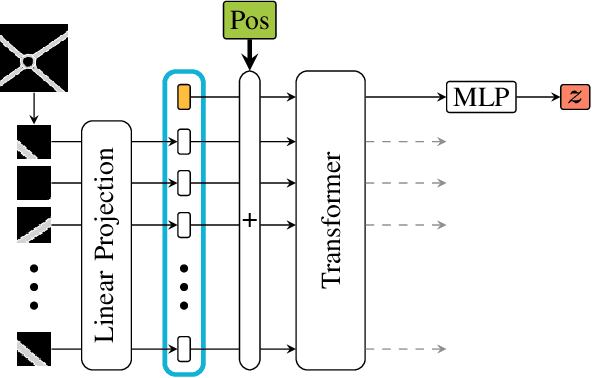
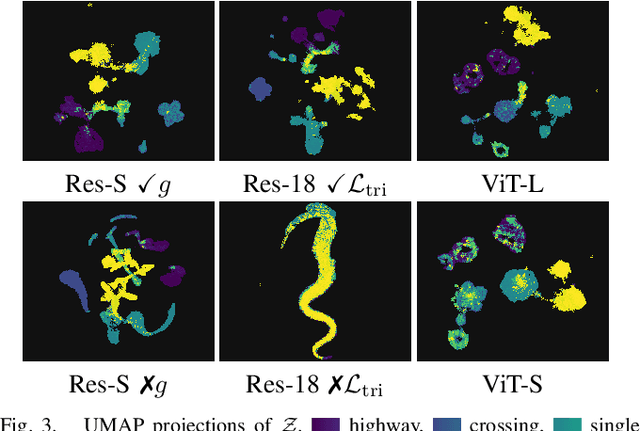
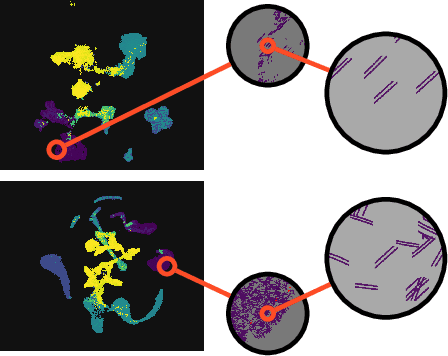
Detecting unknown and untested scenarios is crucial for scenario-based testing. Scenario-based testing is considered to be a possible approach to validate autonomous vehicles. A traffic scenario consists of multiple components, with infrastructure being one of it. In this work, a method to detect novel traffic scenarios based on their infrastructure images is presented. An autoencoder triplet network provides latent representations for infrastructure images which are used for outlier detection. The triplet training of the network is based on the connectivity graphs of the infrastructure. By using the proposed architecture, expert-knowledge is used to shape the latent space such that it incorporates a pre-defined similarity in the neighborhood relationships of an autoencoder. An ablation study on the architecture is highlighting the importance of the triplet autoencoder combination. The best performing architecture is based on vision transformers, a convolution-free attention-based network. The presented method outperforms other state-of-the-art outlier detection approaches.