 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevenue Management without Demand Forecasting: A Data-Driven Approach for Bid Price Generation
Apr 14, 2023Traditional revenue management relies on long and stable historical data and predictable demand patterns. However, meeting those requirements is not always possible. Many industries face demand volatility on an ongoing basis, an example would be air cargo which has much shorter booking horizon with highly variable batch arrivals. Even for passenger airlines where revenue management (RM) is well-established, reacting to external shocks is a well-known challenge that requires user monitoring and manual intervention. Moreover, traditional RM comes with strict data requirements including historical bookings and pricing even in the absence of any bookings, spanning multiple years. For companies that have not established a practice in RM, that type of extensive data is usually not available. We present a data-driven approach to RM which eliminates the need for demand forecasting and optimization techniques. We develop a methodology to generate bid prices using historical booking data only. Our approach is an ex-post greedy heuristic to estimate proxies for marginal opportunity costs as a function of remaining capacity and time-to-departure solely based on historical booking data. We utilize a neural network algorithm to project bid price estimations into the future. We conduct an extensive simulation study where we measure performance of our methodology compared to that of an optimally generated bid price using dynamic programming (DP). We also extend our simulations to measure performance of both data-driven and DP generated bid prices under the presence of demand misspecification. Our results show that our data-driven methodology stays near a theoretical optimum (<1% revenue gap) for a wide-range of settings, whereas DP deviates more significantly from the optimal as the magnitude of misspecification is increased. This highlights the robustness of our data-driven approach.
DLCSS: Dynamic Longest Common Subsequences
Jul 13, 2022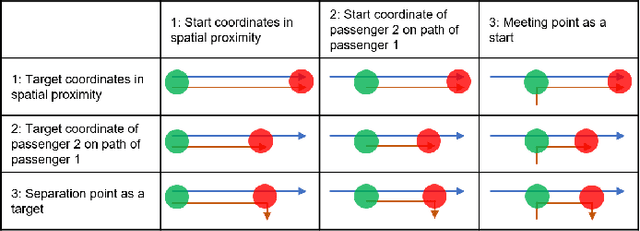
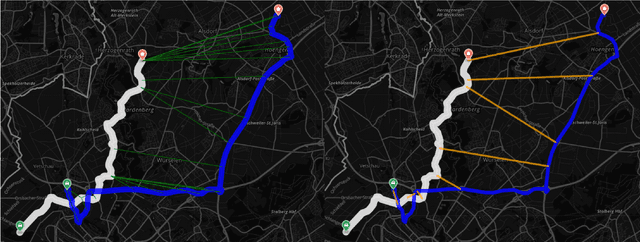
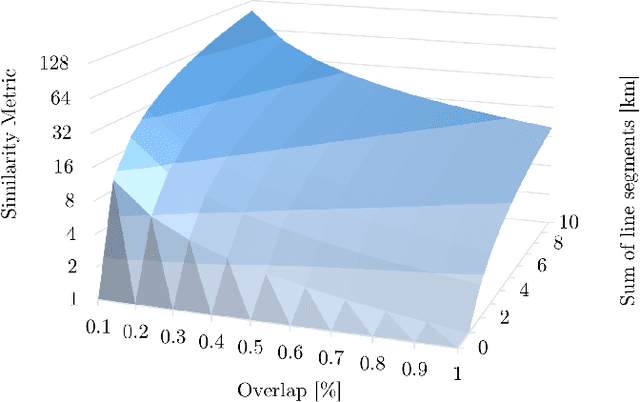
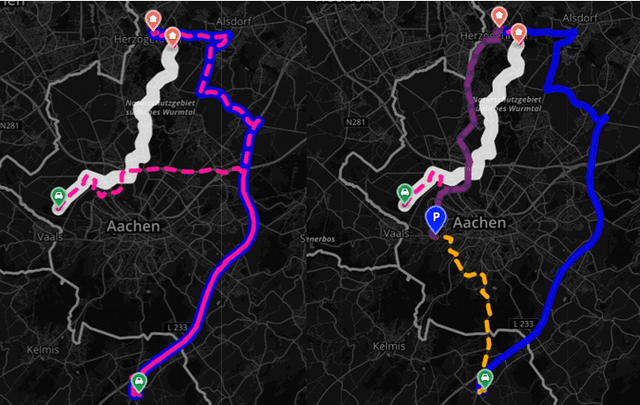
Autonomous driving is a key technology towards a brighter, more sustainable future. To enable such a future, it is necessary to utilize autonomous vehicles in shared mobility models. However, to evaluate, whether two or more route requests have the potential for a shared ride, is a compute-intensive task, if done by rerouting. In this work, we propose the Dynamic Longest Common Subsequences algorithm for fast and cost-efficient comparison of two routes for their compatibility, dynamically only incorporating parts of the routes which are suited for a shared trip. Based on this, one can also estimate, how many autonomous vehicles might be necessary to fulfill the local mobility demands. This can help providers to estimate the necessary fleet sizes, policymakers to better understand mobility patterns and cities to scale necessary infrastructure.
Machine Learning based Framework for Robust Price-Sensitivity Estimation with Application to Airline Pricing
May 04, 2022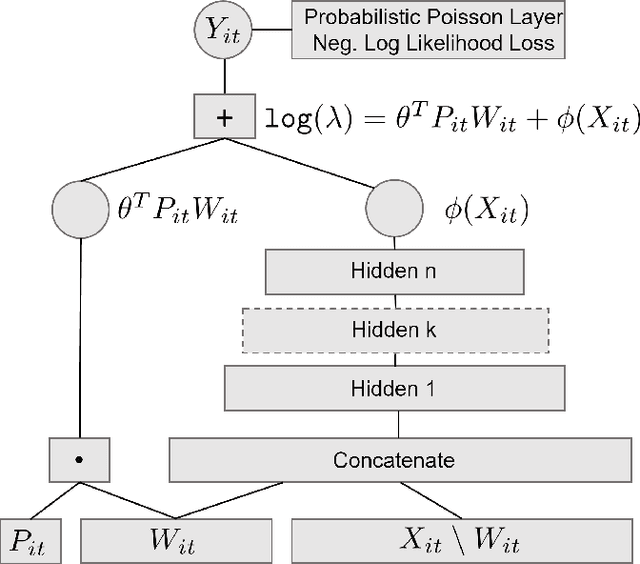
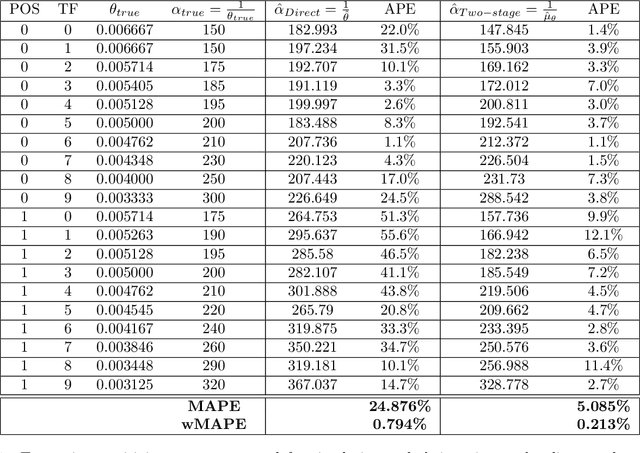
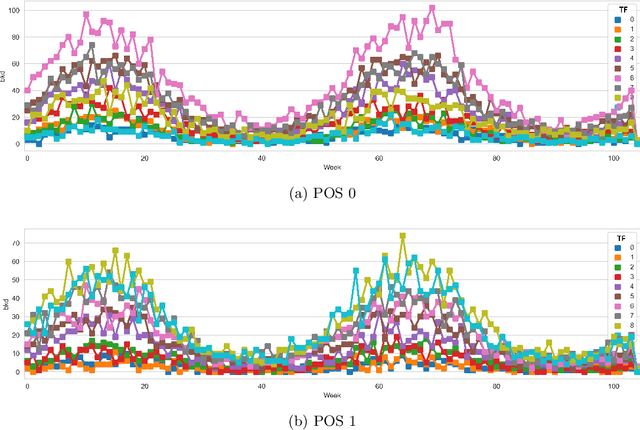
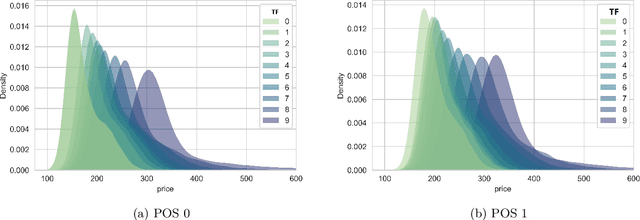
We consider the problem of dynamic pricing of a product in the presence of feature-dependent price sensitivity. Based on the Poisson semi-parametric approach, we construct a flexible yet interpretable demand model where the price related part is parametric while the remaining (nuisance) part of the model is non-parametric and can be modeled via sophisticated ML techniques. The estimation of price-sensitivity parameters of this model via direct one-stage regression techniques may lead to biased estimates. We propose a two-stage estimation methodology which makes the estimation of the price-sensitivity parameters robust to biases in the nuisance parameters of the model. In the first-stage we construct the estimators of observed purchases and price given the feature vector using sophisticated ML estimators like deep neural networks. Utilizing the estimators from the first-stage, in the second-stage we leverage a Bayesian dynamic generalized linear model to estimate the price-sensitivity parameters. We test the performance of the proposed estimation schemes on simulated and real sales transaction data from Airline industry. Our numerical studies demonstrate that the two-stage approach provides more accurate estimates of price-sensitivity parameters as compared to direct one-stage approach.
Compressing Sensor Data for Remote Assistance of Autonomous Vehicles using Deep Generative Models
Nov 09, 2021
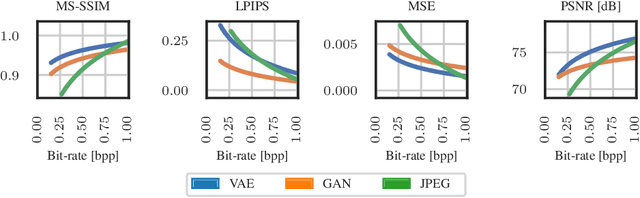


In the foreseeable future, autonomous vehicles will require human assistance in situations they can not resolve on their own. In such scenarios, remote assistance from a human can provide the required input for the vehicle to continue its operation. Typical sensors used in autonomous vehicles include camera and lidar sensors. Due to the massive volume of sensor data that must be sent in real-time, highly efficient data compression is elementary to prevent an overload of network infrastructure. Sensor data compression using deep generative neural networks has been shown to outperform traditional compression approaches for both image and lidar data, regarding compression rate as well as reconstruction quality. However, there is a lack of research about the performance of generative-neural-network-based compression algorithms for remote assistance. In order to gain insights into the feasibility of deep generative models for usage in remote assistance, we evaluate state-of-the-art algorithms regarding their applicability and identify potential weaknesses. Further, we implement an online pipeline for processing sensor data and demonstrate its performance for remote assistance using the CARLA simulator.