 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressing Sensor Data for Remote Assistance of Autonomous Vehicles using Deep Generative Models
Nov 09, 2021
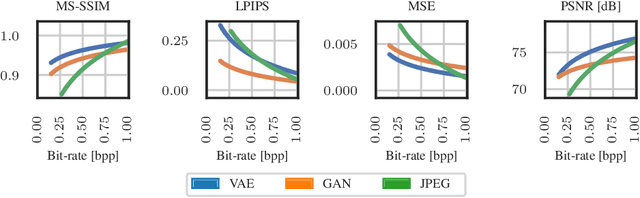


In the foreseeable future, autonomous vehicles will require human assistance in situations they can not resolve on their own. In such scenarios, remote assistance from a human can provide the required input for the vehicle to continue its operation. Typical sensors used in autonomous vehicles include camera and lidar sensors. Due to the massive volume of sensor data that must be sent in real-time, highly efficient data compression is elementary to prevent an overload of network infrastructure. Sensor data compression using deep generative neural networks has been shown to outperform traditional compression approaches for both image and lidar data, regarding compression rate as well as reconstruction quality. However, there is a lack of research about the performance of generative-neural-network-based compression algorithms for remote assistance. In order to gain insights into the feasibility of deep generative models for usage in remote assistance, we evaluate state-of-the-art algorithms regarding their applicability and identify potential weaknesses. Further, we implement an online pipeline for processing sensor data and demonstrate its performance for remote assistance using the CARLA simulator.