 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Detection of Unknown Objects on Roads for Autonomous Driving
May 03, 2022

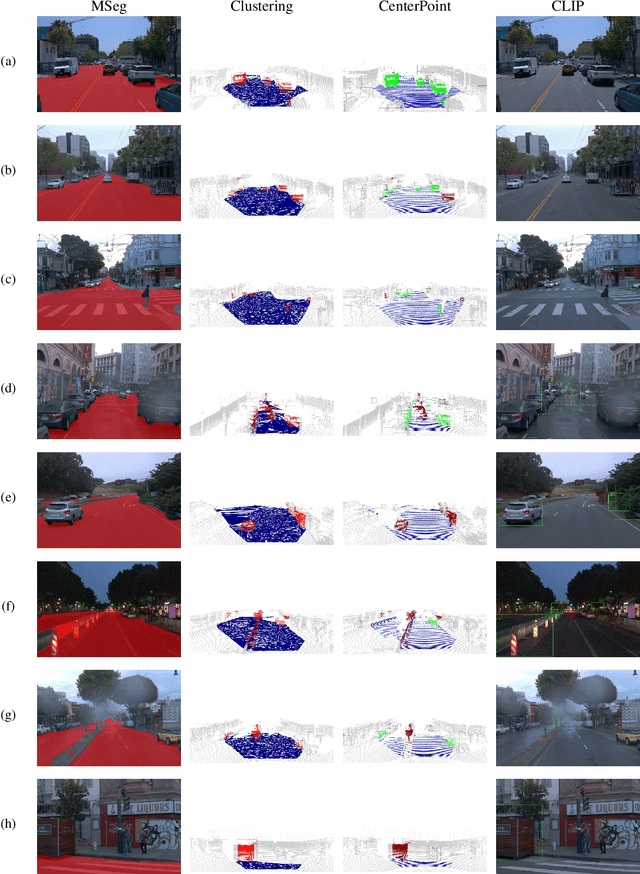
Tremendous progress in deep learning over the last years has led towards a future with autonomous vehicles on our roads. Nevertheless, the performance of their perception systems is strongly dependent on the quality of the utilized training data. As these usually only cover a fraction of all object classes an autonomous driving system will face, such systems struggle with handling the unexpected. In order to safely operate on public roads, the identification of objects from unknown classes remains a crucial task. In this paper, we propose a novel pipeline to detect unknown objects. Instead of focusing on a single sensor modality, we make use of lidar and camera data by combining state-of-the art detection models in a sequential manner. We evaluate our approach on the Waymo Open Perception Dataset and point out current research gaps in anomaly detection.
Compressing Sensor Data for Remote Assistance of Autonomous Vehicles using Deep Generative Models
Nov 09, 2021
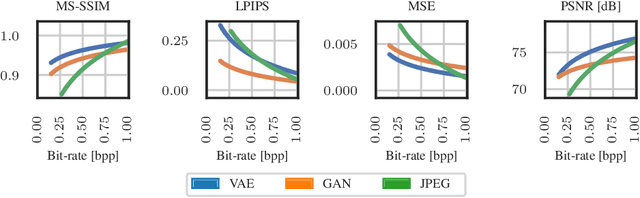


In the foreseeable future, autonomous vehicles will require human assistance in situations they can not resolve on their own. In such scenarios, remote assistance from a human can provide the required input for the vehicle to continue its operation. Typical sensors used in autonomous vehicles include camera and lidar sensors. Due to the massive volume of sensor data that must be sent in real-time, highly efficient data compression is elementary to prevent an overload of network infrastructure. Sensor data compression using deep generative neural networks has been shown to outperform traditional compression approaches for both image and lidar data, regarding compression rate as well as reconstruction quality. However, there is a lack of research about the performance of generative-neural-network-based compression algorithms for remote assistance. In order to gain insights into the feasibility of deep generative models for usage in remote assistance, we evaluate state-of-the-art algorithms regarding their applicability and identify potential weaknesses. Further, we implement an online pipeline for processing sensor data and demonstrate its performance for remote assistance using the CARLA simulator.