 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Adversarial Robustness of Model-Level Mixture-of-Experts Architectures for Semantic Segmentation
Dec 16, 2024



Vulnerability to adversarial attacks is a well-known deficiency of deep neural networks. Larger networks are generally more robust, and ensembling is one method to increase adversarial robustness: each model's weaknesses are compensated by the strengths of others. While an ensemble uses a deterministic rule to combine model outputs, a mixture of experts (MoE) includes an additional learnable gating component that predicts weights for the outputs of the expert models, thus determining their contributions to the final prediction. MoEs have been shown to outperform ensembles on specific tasks, yet their susceptibility to adversarial attacks has not been studied yet. In this work, we evaluate the adversarial vulnerability of MoEs for semantic segmentation of urban and highway traffic scenes. We show that MoEs are, in most cases, more robust to per-instance and universal white-box adversarial attacks and can better withstand transfer attacks. Our code is available at \url{https://github.com/KASTEL-MobilityLab/mixtures-of-experts/}.
Multimodal Detection of Unknown Objects on Roads for Autonomous Driving
May 03, 2022

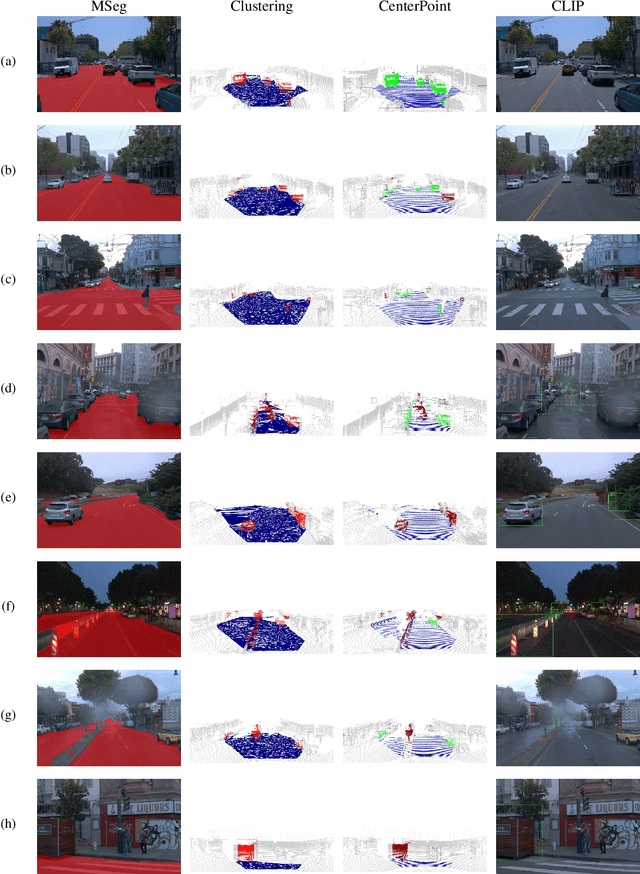
Tremendous progress in deep learning over the last years has led towards a future with autonomous vehicles on our roads. Nevertheless, the performance of their perception systems is strongly dependent on the quality of the utilized training data. As these usually only cover a fraction of all object classes an autonomous driving system will face, such systems struggle with handling the unexpected. In order to safely operate on public roads, the identification of objects from unknown classes remains a crucial task. In this paper, we propose a novel pipeline to detect unknown objects. Instead of focusing on a single sensor modality, we make use of lidar and camera data by combining state-of-the art detection models in a sequential manner. We evaluate our approach on the Waymo Open Perception Dataset and point out current research gaps in anomaly detection.