 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBringing a Personal Point of View: Evaluating Dynamic 3D Gaussian Splatting for Egocentric Scene Reconstruction
Apr 26, 2026Egocentric video provides a unique view into human perception and interaction, with growing relevance for augmented reality, robotics, and assistive technologies. However, rapid camera motion and complex scene dynamics pose major challenges for 3D reconstruction from this perspective. While 3D Gaussian Splatting (3DGS) has become a state-of-the-art method for efficient, high-quality novel view synthesis, variants, that focus on reconstructing dynamic scenes from monocular video are rarely evaluated on egocentric video. It remains unclear whether existing models generalize to this setting or if egocentric-specific solutions are needed. In this work, we evaluate dynamic monocular 3DGS models on egocentric and exocentric video using paired ego-exo recordings from the EgoExo4D dataset. We find that reconstruction quality is consistently lower in egocentric views. Analysis reveals that the difference in reconstruction quality, measured in peak signal-to-noise ratio, stems from the reconstruction of static, not dynamic, content. Our findings underscore current limitations and motivate the development of egocentric-specific approaches, while also highlighting the value of separately evaluating static and dynamic regions of a video.
Viser: Imperative, Web-based 3D Visualization in Python
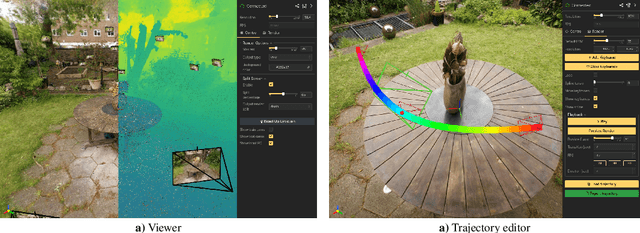
Jul 30, 2025We present Viser, a 3D visualization library for computer vision and robotics. Viser aims to bring easy and extensible 3D visualization to Python: we provide a comprehensive set of 3D scene and 2D GUI primitives, which can be used independently with minimal setup or composed to build specialized interfaces. This technical report describes Viser's features, interface, and implementation. Key design choices include an imperative-style API and a web-based viewer, which improve compatibility with modern programming patterns and workflows.
LODGE: Level-of-Detail Large-Scale Gaussian Splatting with Efficient Rendering
May 29, 2025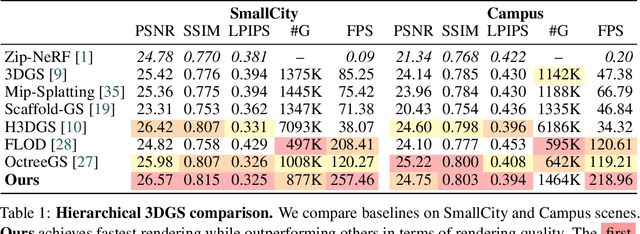
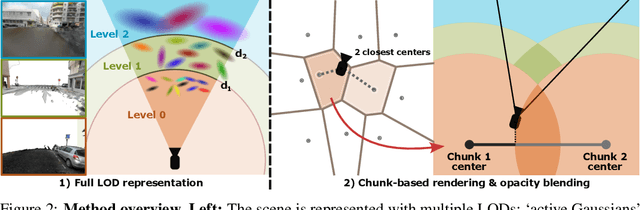
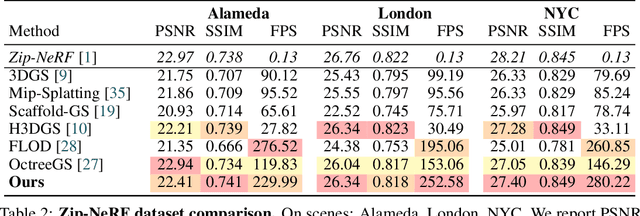
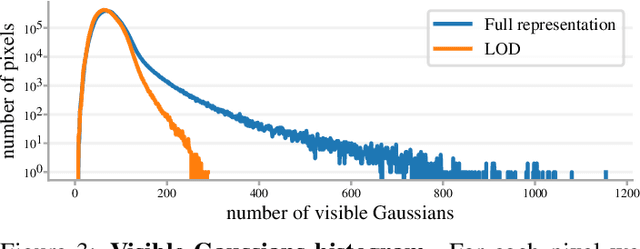
In this work, we present a novel level-of-detail (LOD) method for 3D Gaussian Splatting that enables real-time rendering of large-scale scenes on memory-constrained devices. Our approach introduces a hierarchical LOD representation that iteratively selects optimal subsets of Gaussians based on camera distance, thus largely reducing both rendering time and GPU memory usage. We construct each LOD level by applying a depth-aware 3D smoothing filter, followed by importance-based pruning and fine-tuning to maintain visual fidelity. To further reduce memory overhead, we partition the scene into spatial chunks and dynamically load only relevant Gaussians during rendering, employing an opacity-blending mechanism to avoid visual artifacts at chunk boundaries. Our method achieves state-of-the-art performance on both outdoor (Hierarchical 3DGS) and indoor (Zip-NeRF) datasets, delivering high-quality renderings with reduced latency and memory requirements.
WaterSplatting: Fast Underwater 3D Scene Reconstruction Using Gaussian Splatting
Aug 15, 2024The underwater 3D scene reconstruction is a challenging, yet interesting problem with applications ranging from naval robots to VR experiences. The problem was successfully tackled by fully volumetric NeRF-based methods which can model both the geometry and the medium (water). Unfortunately, these methods are slow to train and do not offer real-time rendering. More recently, 3D Gaussian Splatting (3DGS) method offered a fast alternative to NeRFs. However, because it is an explicit method that renders only the geometry, it cannot render the medium and is therefore unsuited for underwater reconstruction. Therefore, we propose a novel approach that fuses volumetric rendering with 3DGS to handle underwater data effectively. Our method employs 3DGS for explicit geometry representation and a separate volumetric field (queried once per pixel) for capturing the scattering medium. This dual representation further allows the restoration of the scenes by removing the scattering medium. Our method outperforms state-of-the-art NeRF-based methods in rendering quality on the underwater SeaThru-NeRF dataset. Furthermore, it does so while offering real-time rendering performance, addressing the efficiency limitations of existing methods. Web: https://water-splatting.github.io
WildGaussians: 3D Gaussian Splatting in the Wild
Jul 11, 2024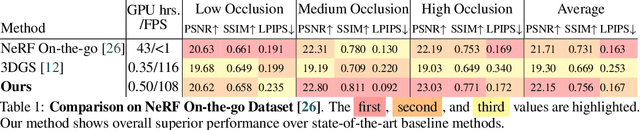
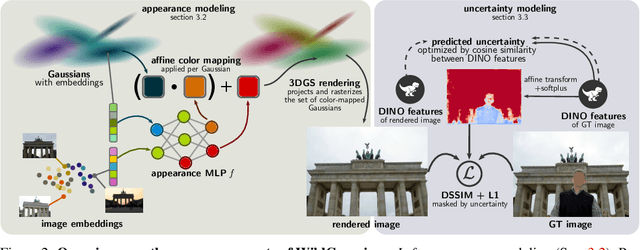
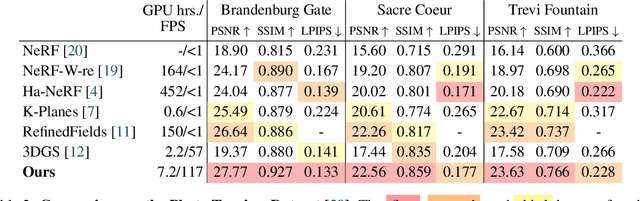
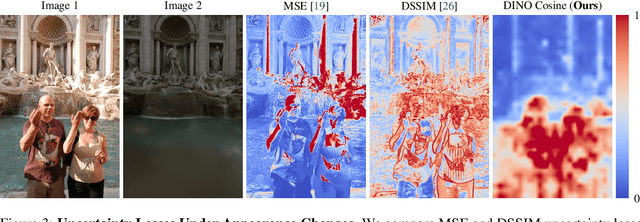
While the field of 3D scene reconstruction is dominated by NeRFs due to their photorealistic quality, 3D Gaussian Splatting (3DGS) has recently emerged, offering similar quality with real-time rendering speeds. However, both methods primarily excel with well-controlled 3D scenes, while in-the-wild data - characterized by occlusions, dynamic objects, and varying illumination - remains challenging. NeRFs can adapt to such conditions easily through per-image embedding vectors, but 3DGS struggles due to its explicit representation and lack of shared parameters. To address this, we introduce WildGaussians, a novel approach to handle occlusions and appearance changes with 3DGS. By leveraging robust DINO features and integrating an appearance modeling module within 3DGS, our method achieves state-of-the-art results. We demonstrate that WildGaussians matches the real-time rendering speed of 3DGS while surpassing both 3DGS and NeRF baselines in handling in-the-wild data, all within a simple architectural framework.
NerfBaselines: Consistent and Reproducible Evaluation of Novel View Synthesis Methods
Jun 25, 2024
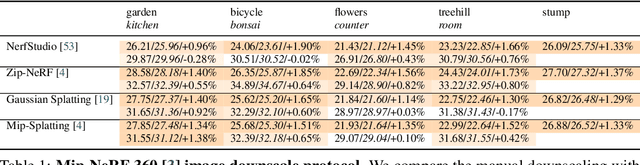
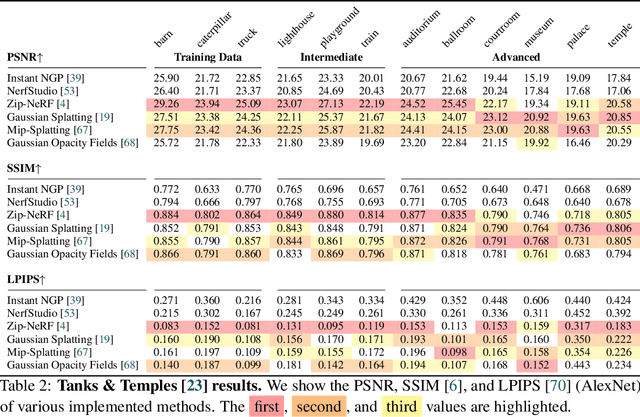
Novel view synthesis is an important problem with many applications, including AR/VR, gaming, and simulations for robotics. With the recent rapid development of Neural Radiance Fields (NeRFs) and 3D Gaussian Splatting (3DGS) methods, it is becoming difficult to keep track of the current state of the art (SoTA) due to methods using different evaluation protocols, codebases being difficult to install and use, and methods not generalizing well to novel 3D scenes. Our experiments support this claim by showing that tiny differences in evaluation protocols of various methods can lead to inconsistent reported metrics. To address these issues, we propose a framework called NerfBaselines, which simplifies the installation of various methods, provides consistent benchmarking tools, and ensures reproducibility. We validate our implementation experimentally by reproducing numbers reported in the original papers. To further improve the accessibility, we release a web platform where commonly used methods are compared on standard benchmarks. Web: https://jkulhanek.com/nerfbaselines
Dynamic 3D Gaussian Fields for Urban Areas
Jun 05, 2024
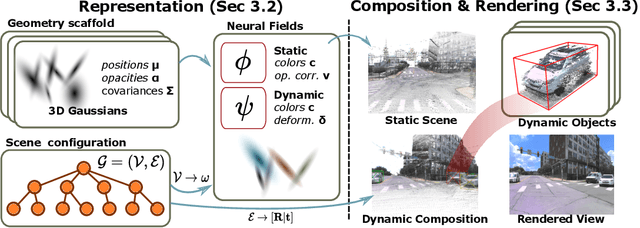
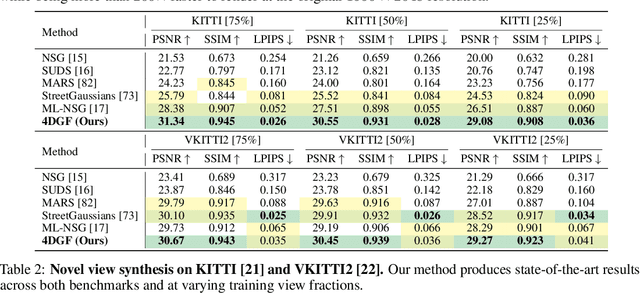
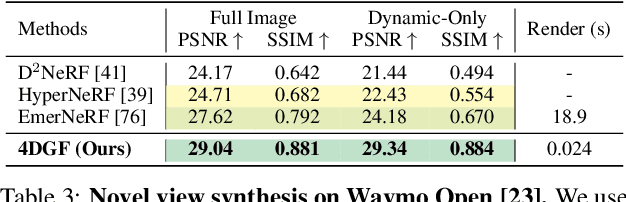
We present an efficient neural 3D scene representation for novel-view synthesis (NVS) in large-scale, dynamic urban areas. Existing works are not well suited for applications like mixed-reality or closed-loop simulation due to their limited visual quality and non-interactive rendering speeds. Recently, rasterization-based approaches have achieved high-quality NVS at impressive speeds. However, these methods are limited to small-scale, homogeneous data, i.e. they cannot handle severe appearance and geometry variations due to weather, season, and lighting and do not scale to larger, dynamic areas with thousands of images. We propose 4DGF, a neural scene representation that scales to large-scale dynamic urban areas, handles heterogeneous input data, and substantially improves rendering speeds. We use 3D Gaussians as an efficient geometry scaffold while relying on neural fields as a compact and flexible appearance model. We integrate scene dynamics via a scene graph at global scale while modeling articulated motions on a local level via deformations. This decomposed approach enables flexible scene composition suitable for real-world applications. In experiments, we surpass the state-of-the-art by over 3 dB in PSNR and more than 200 times in rendering speed.
Tetra-NeRF: Representing Neural Radiance Fields Using Tetrahedra
Apr 19, 2023Neural Radiance Fields (NeRFs) are a very recent and very popular approach for the problems of novel view synthesis and 3D reconstruction. A popular scene representation used by NeRFs is to combine a uniform, voxel-based subdivision of the scene with an MLP. Based on the observation that a (sparse) point cloud of the scene is often available, this paper proposes to use an adaptive representation based on tetrahedra and a Delaunay representation instead of the uniform subdivision or point-based representations. We show that such a representation enables efficient training and leads to state-of-the-art results. Our approach elegantly combines concepts from 3D geometry processing, triangle-based rendering, and modern neural radiance fields. Compared to voxel-based representations, ours provides more detail around parts of the scene likely to be close to the surface. Compared to point-based representations, our approach achieves better performance.