 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePanopticon: Advancing Any-Sensor Foundation Models for Earth Observation
Mar 13, 2025Earth observation (EO) data features diverse sensing platforms with varying spectral bands, spatial resolutions, and sensing modalities. While most prior work has constrained inputs to fixed sensors, a new class of any-sensor foundation models able to process arbitrary sensors has recently emerged. Contributing to this line of work, we propose Panopticon, an any-sensor foundation model built on the DINOv2 framework. We extend DINOv2 by (1) treating images of the same geolocation across sensors as natural augmentations, (2) subsampling channels to diversify spectral input, and (3) adding a cross attention over channels as a flexible patch embedding mechanism. By encoding the wavelength and modes of optical and synthetic aperture radar sensors, respectively, Panopticon can effectively process any combination of arbitrary channels. In extensive evaluations, we achieve state-of-the-art performance on GEO-Bench, especially on the widely-used Sentinel-1 and Sentinel-2 sensors, while out-competing other any-sensor models, as well as domain adapted fixed-sensor models on unique sensor configurations. Panopticon enables immediate generalization to both existing and future satellite platforms, advancing sensor-agnostic EO.
Judging It, Washing It: Scoring and Greenwashing Corporate Climate Disclosures using Large Language Models
Feb 20, 2025We study the use of large language models (LLMs) to both evaluate and greenwash corporate climate disclosures. First, we investigate the use of the LLM-as-a-Judge (LLMJ) methodology for scoring company-submitted reports on emissions reduction targets and progress. Second, we probe the behavior of an LLM when it is prompted to greenwash a response subject to accuracy and length constraints. Finally, we test the robustness of the LLMJ methodology against responses that may be greenwashed using an LLM. We find that two LLMJ scoring systems, numerical rating and pairwise comparison, are effective in distinguishing high-performing companies from others, with the pairwise comparison system showing greater robustness against LLM-greenwashed responses.
Active Dynamical Prospection: Modeling Mental Simulation as Particle Filtering for Sensorimotor Control during Pathfinding
Mar 14, 2021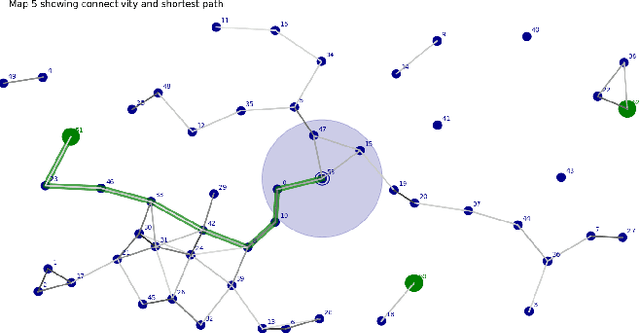


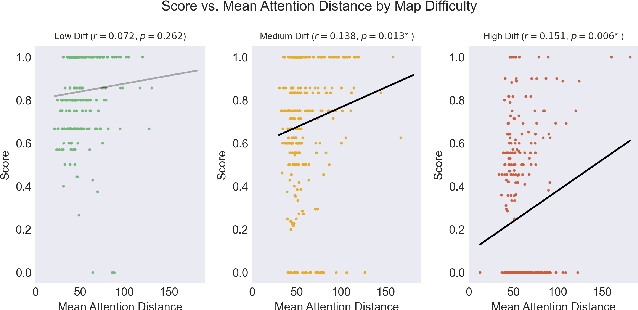
What do humans do when confronted with a common challenge: we know where we want to go but we are not yet sure the best way to get there, or even if we can. This is the problem posed to agents during spatial navigation and pathfinding, and its solution may give us clues about the more abstract domain of planning in general. In this work, we model pathfinding behavior in a continuous, explicitly exploratory paradigm. In our task, participants (and agents) must coordinate both visual exploration and navigation within a partially observable environment. Our contribution has three primary components: 1) an analysis of behavioral data from 81 human participants in a novel pathfinding paradigm conducted as an online experiment, 2) a proposal to model prospective mental simulation during navigation as particle filtering, and 3) an instantiation of this proposal in a computational agent. We show that our model, Active Dynamical Prospection, demonstrates similar patterns of map solution rate, path selection, and trial duration, as well as attentional behavior (at both aggregate and individual levels) when compared with data from human participants. We also find that both distal attention and delay prior to first move (both potential correlates of prospective simulation) are predictive of task performance.
Designing Commercial Therapeutic Robots for Privacy Preserving Systems and Ethical Research Practices within the Home
Jun 29, 2016The migration of robots from the laboratory into sensitive home settings as commercially available therapeutic agents represents a significant transition for information privacy and ethical imperatives. We present new privacy paradigms and apply the Fair Information Practices (FIPs) to investigate concerns unique to the placement of therapeutic robots in private home contexts. We then explore the importance and utility of research ethics as operationalized by existing human subjects research frameworks to guide the consideration of therapeutic robotic users -- a step vital to the continued research and development of these platforms. Together, privacy and research ethics frameworks provide two complementary approaches to protect users and ensure responsible yet robust information sharing for technology development. We make recommendations for the implementation of these principles -- paying particular attention to specific principles that apply to vulnerable individuals (i.e., children, disabled, or elderly persons)--to promote the adoption and continued improvement of long-term, responsible, and research-enabled robotics in private settings.