 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMap Space Belief Prediction for Manipulation-Enhanced Mapping
Feb 28, 2025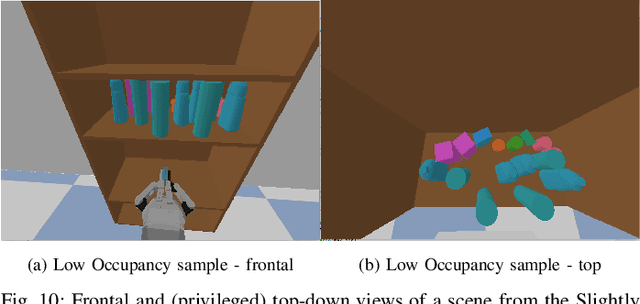
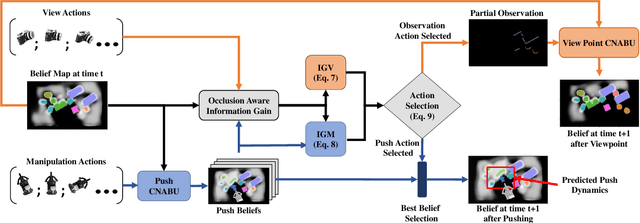
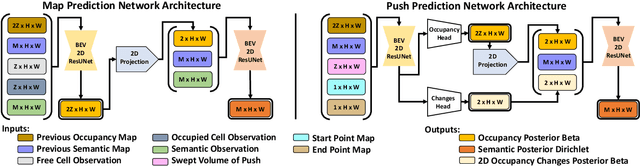
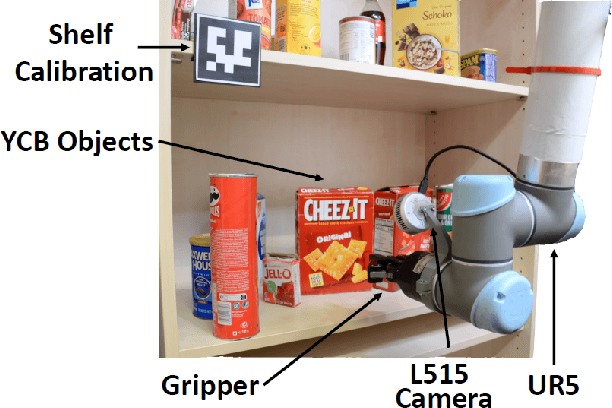
Searching for objects in cluttered environments requires selecting efficient viewpoints and manipulation actions to remove occlusions and reduce uncertainty in object locations, shapes, and categories. In this work, we address the problem of manipulation-enhanced semantic mapping, where a robot has to efficiently identify all objects in a cluttered shelf. Although Partially Observable Markov Decision Processes~(POMDPs) are standard for decision-making under uncertainty, representing unstructured interactive worlds remains challenging in this formalism. To tackle this, we define a POMDP whose belief is summarized by a metric-semantic grid map and propose a novel framework that uses neural networks to perform map-space belief updates to reason efficiently and simultaneously about object geometries, locations, categories, occlusions, and manipulation physics. Further, to enable accurate information gain analysis, the learned belief updates should maintain calibrated estimates of uncertainty. Therefore, we propose Calibrated Neural-Accelerated Belief Updates (CNABUs) to learn a belief propagation model that generalizes to novel scenarios and provides confidence-calibrated predictions for unknown areas. Our experiments show that our novel POMDP planner improves map completeness and accuracy over existing methods in challenging simulations and successfully transfers to real-world cluttered shelves in zero-shot fashion.
On the Overconfidence Problem in Semantic 3D Mapping
Nov 16, 2023Semantic 3D mapping, the process of fusing depth and image segmentation information between multiple views to build 3D maps annotated with object classes in real-time, is a recent topic of interest. This paper highlights the fusion overconfidence problem, in which conventional mapping methods assign high confidence to the entire map even when they are incorrect, leading to miscalibrated outputs. Several methods to improve uncertainty calibration at different stages in the fusion pipeline are presented and compared on the ScanNet dataset. We show that the most widely used Bayesian fusion strategy is among the worst calibrated, and propose a learned pipeline that combines fusion and calibration, GLFS, which achieves simultaneously higher accuracy and 3D map calibration while retaining real-time capability. We further illustrate the importance of map calibration on a downstream task by showing that incorporating proper semantic fusion on a modular ObjectNav agent improves its success rates. Our code will be provided on Github for reproducibility upon acceptance.
Optimized Coverage Planning for UV Surface Disinfection
Mar 25, 2021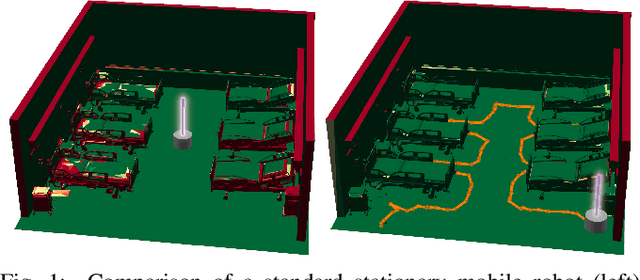
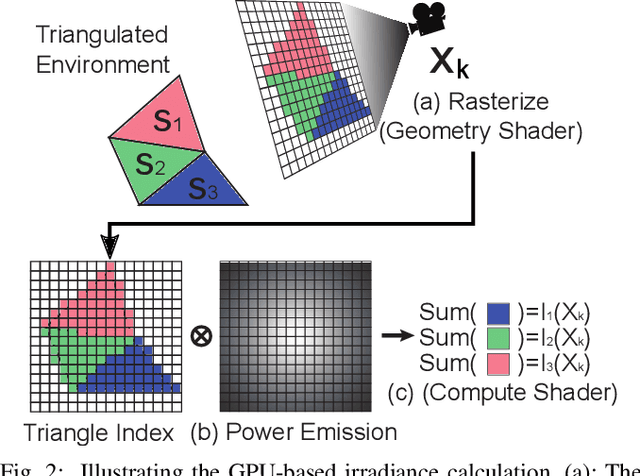
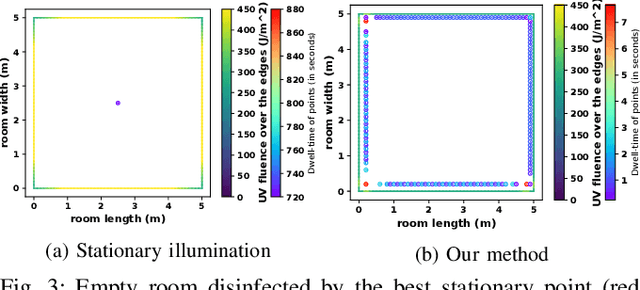
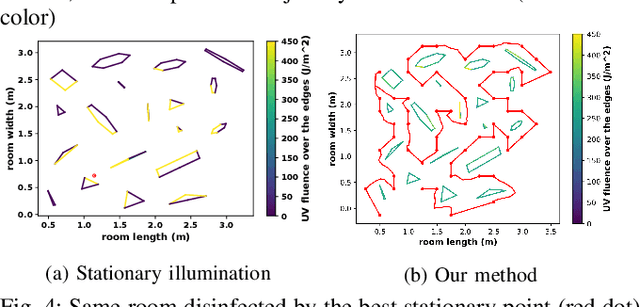
UV radiation has been used as a disinfection strategy to deactivate a wide range of pathogens, but existing irradiation strategies do not ensure sufficient exposure of all environmental surfaces and/or require long disinfection times. We present a near-optimal coverage planner for mobile UV disinfection robots. The formulation optimizes the irradiation time efficiency, while ensuring that a sufficient dosage of radiation is received by each surface. The trajectory and dosage plan are optimized taking collision and light occlusion constraints into account. We propose a two-stage scheme to approximate the solution of the induced NP-hard optimization, and, for efficiency, perform key irradiance and occlusion calculations on a GPU. Empirical results show that our technique achieves more coverage for the same exposure time as strategies for existing UV robots, can be used to compare UV robot designs, and produces near-optimal plans. This is an extended version of the paper originally contributed to ICRA2021.