 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Aware Scanning Parameter Configuration for Robotic Inspection Using Vision Language Embeddings and Hyperdimensional Computing
May 05, 2026Robotic laser profiling is widely used for dimensional verification and surface inspection, yet measurement fidelity is often dominated by sensor configuration rather than robot motion. Industrial profilers expose multiple coupled parameters, including sampling frequency, measurement range, exposure time, receiver dynamic range, and illumination, that are still tuned by trial-and-error; mismatches can cause saturation, clipping, or missing returns that cannot be recovered downstream. We formulate instruction-conditioned sensing parameter recommendation; given a pre-scan RGB observation and a natural-language inspection instruction, infer a discrete configuration over key parameters of a robot-mounted profiler. To benchmark this problem, we develop Instruct-Obs2Param, a real-world multimodal dataset linking inspection intents and multi-view pose and illumination variation across 16 objects to canonical parameter regimes. We then propose ScanHD, a hyperdimensional computing framework that binds instruction and observation into a task-aware code and performs parameter-wise associative reasoning with compact memories, matching discrete scanner regimes while yielding stable, interpretable, low-latency decisions. On Instruct-Obs2Param, ScanHD achieves 92.7% average exact accuracy and 98.1% average Win@1 accuracy across the five parameters, with strong cross-split generalization and low-latency inference suitable for deployment, outperforming rule-based heuristics, conventional multimodal models, and multimodal large language models. This work enables autonomous, instruction-conditioned sensing configuration from task intent and scene context, eliminating manual tuning and elevating sensor configuration from a static setting to an adaptive decision variable.
Seeing the Unseen: Towards Zero-Shot Inspection for Wind Turbine Blades using Knowledge-Augmented Vision Language Models
Oct 26, 2025Wind turbine blades operate in harsh environments, making timely damage detection essential for preventing failures and optimizing maintenance. Drone-based inspection and deep learning are promising, but typically depend on large, labeled datasets, which limit their ability to detect rare or evolving damage types. To address this, we propose a zero-shot-oriented inspection framework that integrates Retrieval-Augmented Generation (RAG) with Vision-Language Models (VLM). A multimodal knowledge base is constructed, comprising technical documentation, representative reference images, and domain-specific guidelines. A hybrid text-image retriever with keyword-aware reranking assembles the most relevant context to condition the VLM at inference, injecting domain knowledge without task-specific training. We evaluate the framework on 30 labeled blade images covering diverse damage categories. Although the dataset is small due to the difficulty of acquiring verified blade imagery, it covers multiple representative defect types. On this test set, the RAG-grounded VLM correctly classified all samples, whereas the same VLM without retrieval performed worse in both accuracy and precision. We further compare against open-vocabulary baselines and incorporate uncertainty Clopper-Pearson confidence intervals to account for the small-sample setting. Ablation studies indicate that the key advantage of the framework lies in explainability and generalizability: retrieved references ground the reasoning process and enable the detection of previously unseen defects by leveraging domain knowledge rather than relying solely on visual cues. This research contributes a data-efficient solution for industrial inspection that reduces dependence on extensive labeled datasets.
ScanBot: Towards Intelligent Surface Scanning in Embodied Robotic Systems
May 22, 2025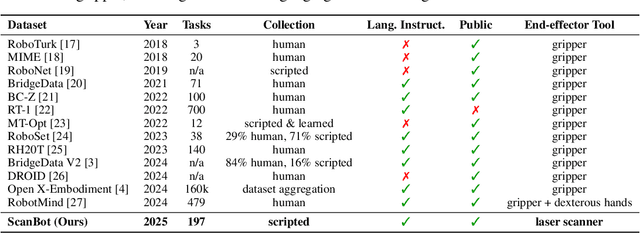
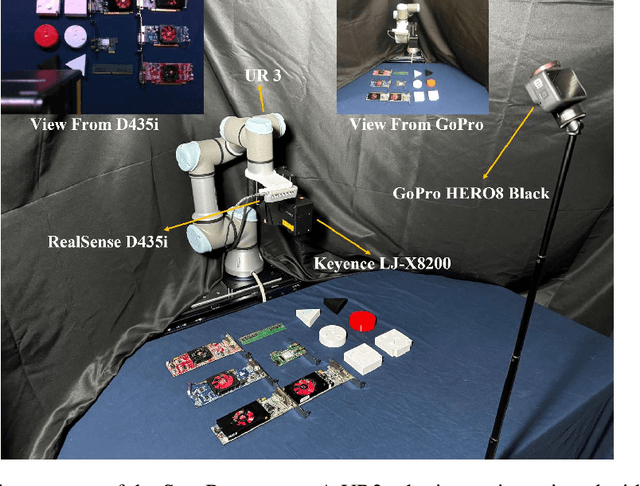
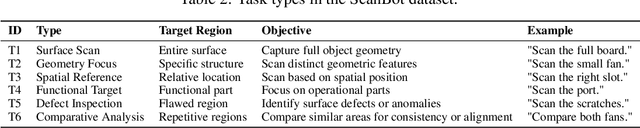
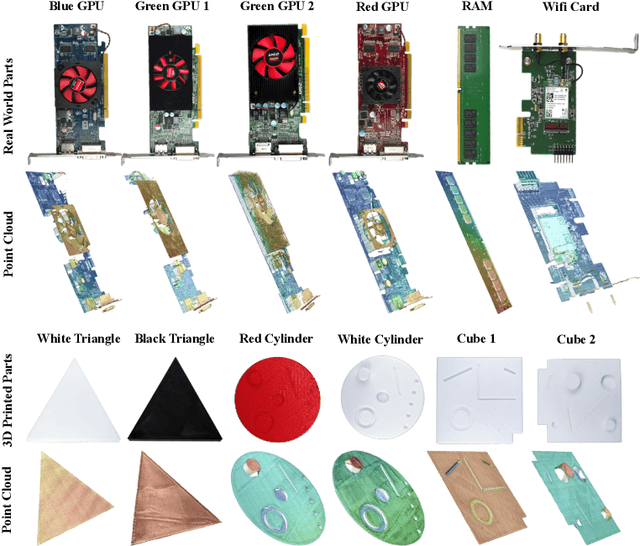
We introduce ScanBot, a novel dataset designed for instruction-conditioned, high-precision surface scanning in robotic systems. In contrast to existing robot learning datasets that focus on coarse tasks such as grasping, navigation, or dialogue, ScanBot targets the high-precision demands of industrial laser scanning, where sub-millimeter path continuity and parameter stability are critical. The dataset covers laser scanning trajectories executed by a robot across 12 diverse objects and 6 task types, including full-surface scans, geometry-focused regions, spatially referenced parts, functionally relevant structures, defect inspection, and comparative analysis. Each scan is guided by natural language instructions and paired with synchronized RGB, depth, and laser profiles, as well as robot pose and joint states. Despite recent progress, existing vision-language action (VLA) models still fail to generate stable scanning trajectories under fine-grained instructions and real-world precision demands. To investigate this limitation, we benchmark a range of multimodal large language models (MLLMs) across the full perception-planning-execution loop, revealing persistent challenges in instruction-following under realistic constraints.
Towards Intelligent Cooperative Robotics in Additive Manufacturing: Past, Present and Future
Aug 09, 2024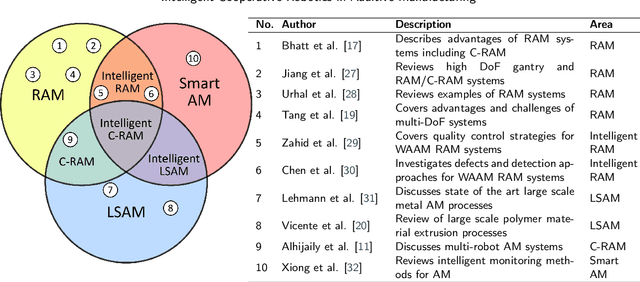
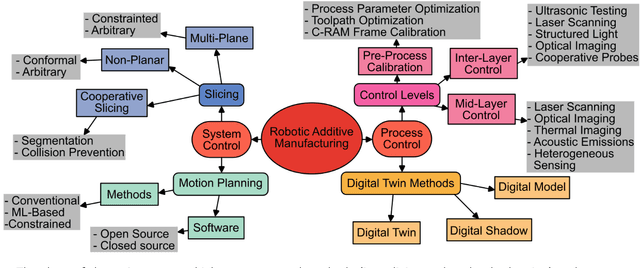
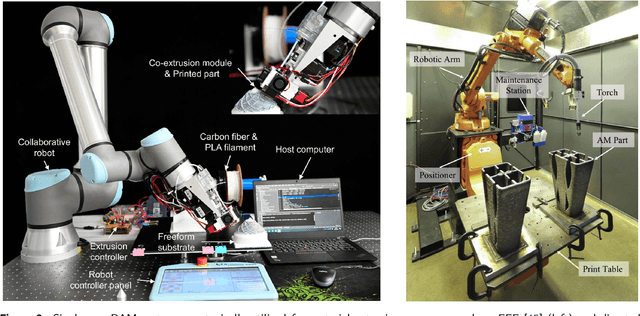
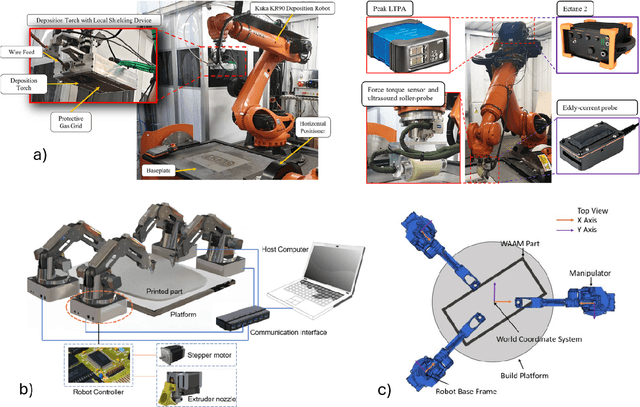
Additive manufacturing (AM) technologies have undergone significant advancements through the integration of cooperative robotics additive manufacturing (C-RAM) platforms. By deploying AM processes on the end effectors of multiple robotic arms, not only are traditional constraints such as limited build volumes circumvented, but systems also achieve accelerated fabrication speeds, cooperative sensing capabilities, and in-situ multi-material deposition. Despite advancements, challenges remain, particularly regarding defect generation including voids, cracks, and residual stress. Various factors contribute to these issues, including toolpath planning (i.e., slicing strategies), part decomposition for cooperative printing, and motion planning (i.e., path and trajectory planning). This review first examines the critical aspects of system control for C-RAM systems comprised of slicing and motion planning. The methods for the mitigation of defects through the adjustment of these aspects and the process parameters of AM methods are then described in the context of how they modify the AM process: pre-process, inter-layer (i.e., during layer pauses), and mid-layer (i.e., during material deposition). The application of advanced sensing technologies, including high-resolution cameras, laser scanners, and thermal imaging, to facilitate the capture of micro, meso, and macro-scale defects is explored. The role of digital twins is analyzed, emphasizing their capability to simulate and predict manufacturing outcomes, enabling preemptive adjustments to prevent defects. Finally, the outlook and future opportunities for developing next-generation C-RAM systems are outlined.
Efficient Characterization of Dynamic Response Variation Using Multi-Fidelity Data Fusion through Composite Neural Network
May 07, 2020
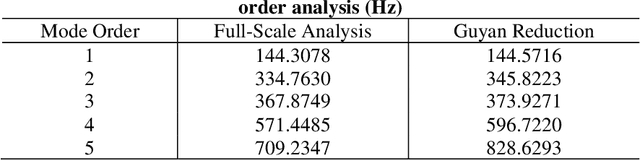
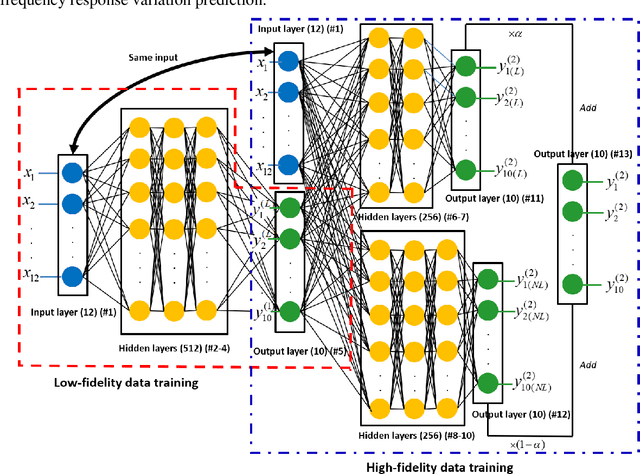
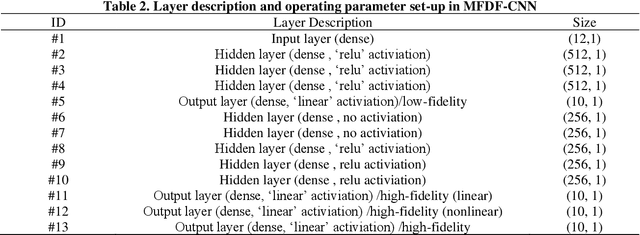
Uncertainties in a structure is inevitable, which generally lead to variation in dynamic response predictions. For a complex structure, brute force Monte Carlo simulation for response variation analysis is infeasible since one single run may already be computationally costly. Data driven meta-modeling approaches have thus been explored to facilitate efficient emulation and statistical inference. The performance of a meta-model hinges upon both the quality and quantity of training dataset. In actual practice, however, high-fidelity data acquired from high-dimensional finite element simulation or experiment are generally scarce, which poses significant challenge to meta-model establishment. In this research, we take advantage of the multi-level response prediction opportunity in structural dynamic analysis, i.e., acquiring rapidly a large amount of low-fidelity data from reduced-order modeling, and acquiring accurately a small amount of high-fidelity data from full-scale finite element analysis. Specifically, we formulate a composite neural network fusion approach that can fully utilize the multi-level, heterogeneous datasets obtained. It implicitly identifies the correlation of the low- and high-fidelity datasets, which yields improved accuracy when compared with the state-of-the-art. Comprehensive investigations using frequency response variation characterization as case example are carried out to demonstrate the performance.
Leveraging Gaussian Process and Voting-Empowered Many-Objective Evaluation for Fault Identification
Oct 29, 2018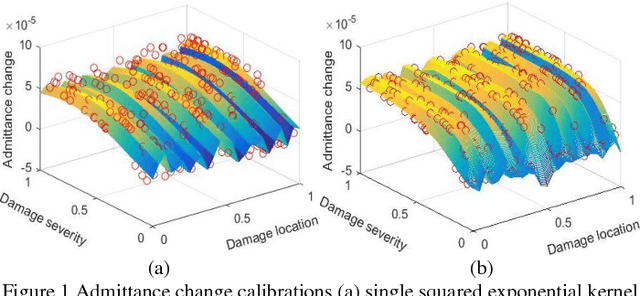
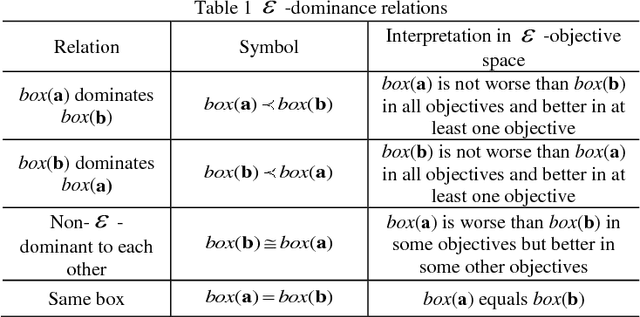
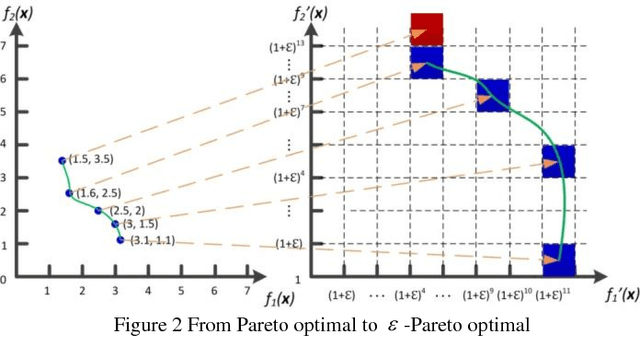
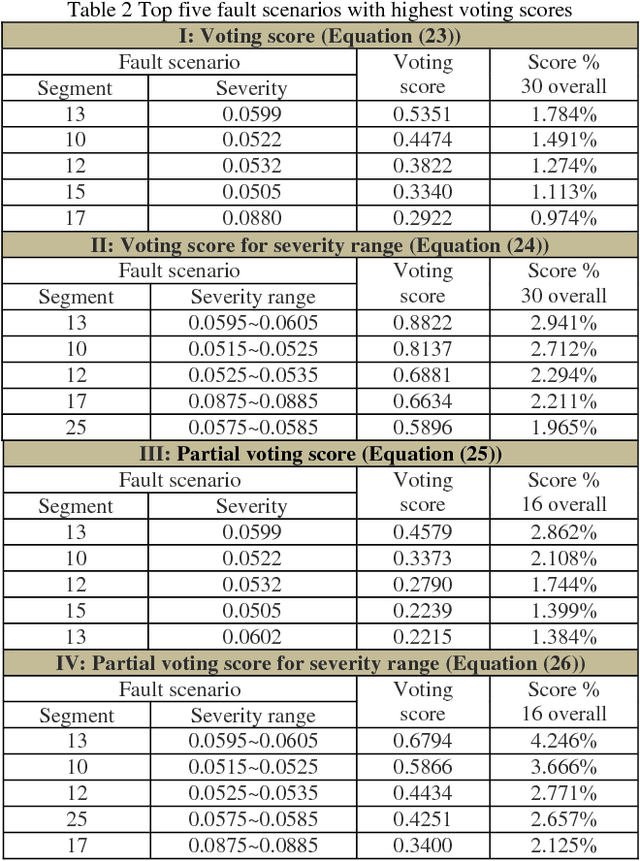
Using piezoelectric impedance/admittance sensing for structural health monitoring is promising, owing to the simplicity in circuitry design as well as the high-frequency interrogation capability. The actual identification of fault location and severity using impedance/admittance measurements, nevertheless, remains to be an extremely challenging task. A first-principle based structural model using finite element discretization requires high dimensionality to characterize the high-frequency response. As such, direct inversion using the sensitivity matrix usually yields an under-determined problem. Alternatively, the identification problem may be cast into an optimization framework in which fault parameters are identified through repeated forward finite element analysis which however is oftentimes computationally prohibitive. This paper presents an efficient data-assisted optimization approach for fault identification without using finite element model iteratively. We formulate a many-objective optimization problem to identify fault parameters, where response surfaces of impedance measurements are constructed through Gaussian process-based calibration. To balance between solution diversity and convergence, an -dominance enabled many-objective simulated annealing algorithm is established. As multiple solutions are expected, a voting score calculation procedure is developed to further identify those solutions that yield better implications regarding structural health condition. The effectiveness of the proposed approach is demonstrated by systematic numerical and experimental case studies.
Pre-Processing-Free Gear Fault Diagnosis Using Small Datasets with Deep Convolutional Neural Network-Based Transfer Learning
Oct 24, 2017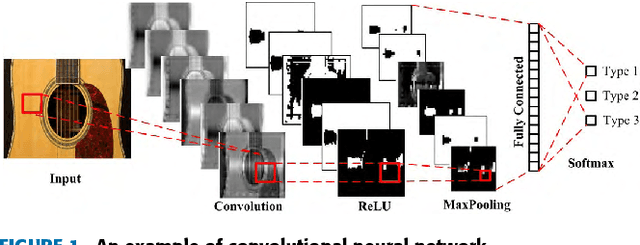
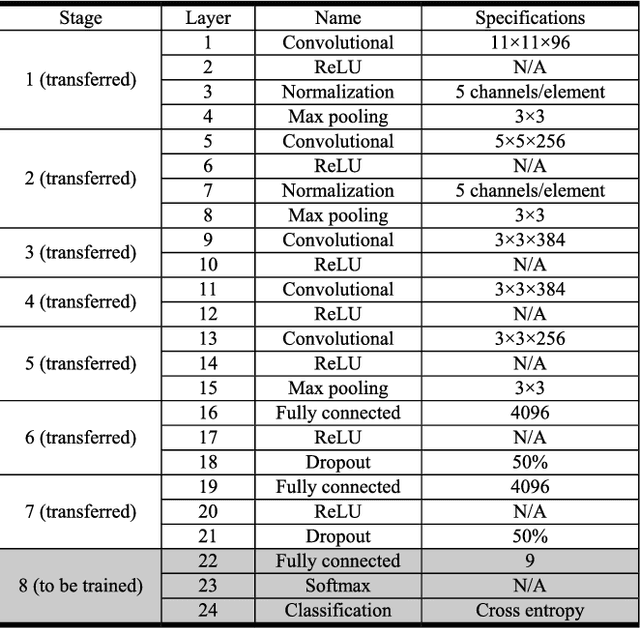
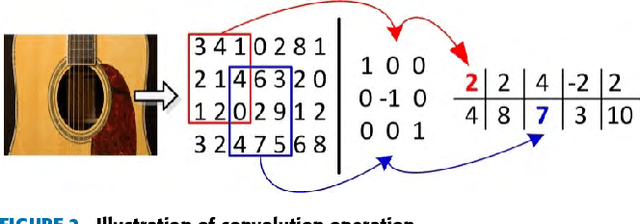
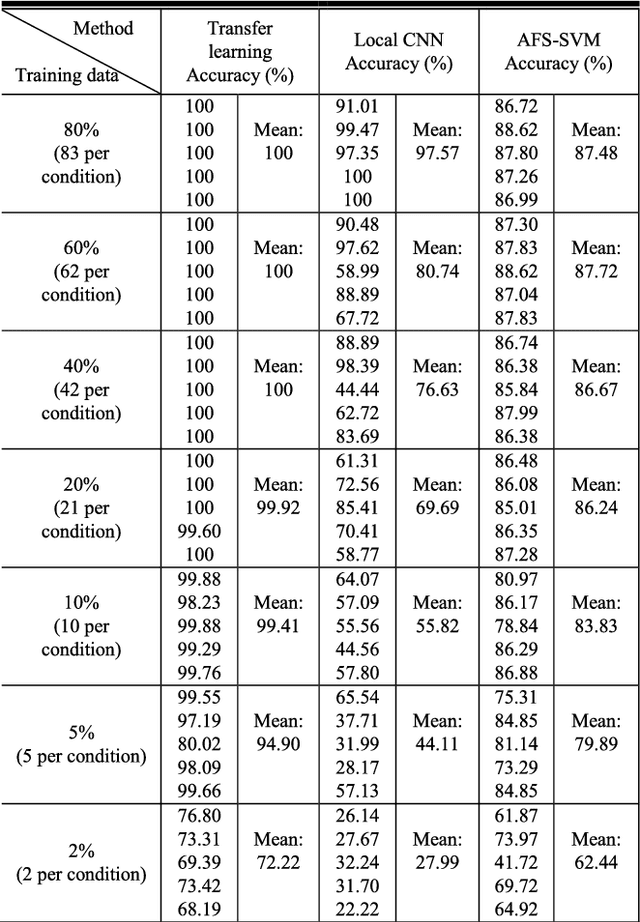
Early fault diagnosis in complex mechanical systems such as gearbox has always been a great challenge, even with the recent development in deep neural networks. The performance of a classic fault diagnosis system predominantly depends on the features extracted and the classifier subsequently applied. Although a large number of attempts have been made regarding feature extraction techniques, the methods require great human involvements are heavily depend on domain expertise and may thus be non-representative and biased from application to application. On the other hand, while the deep neural networks based approaches feature adaptive feature extractions and inherent classifications, they usually require a substantial set of training data and thus hinder their usage for engineering applications with limited training data such as gearbox fault diagnosis. This paper develops a deep convolutional neural network-based transfer learning approach that not only entertains pre-processing free adaptive feature extractions, but also requires only a small set of training data. The proposed approach performs gear fault diagnosis using pre-processing free raw accelerometer data and experiments with various sizes of training data were conducted. The superiority of the proposed approach is revealed by comparing the performance with other methods such as locally trained convolution neural network and angle-frequency analysis based support vector machine. The achieved accuracy indicates that the proposed approach is not only viable and robust, but also has the potential to be readily applicable to other fault diagnosis practices.
A Focal Any-Angle Path-finding Algorithm Based on A* on Visibility Graphs
Jun 09, 2017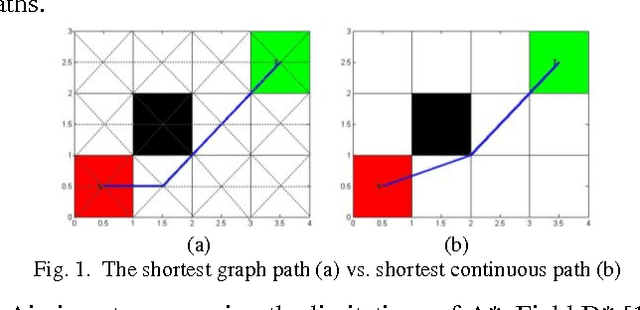
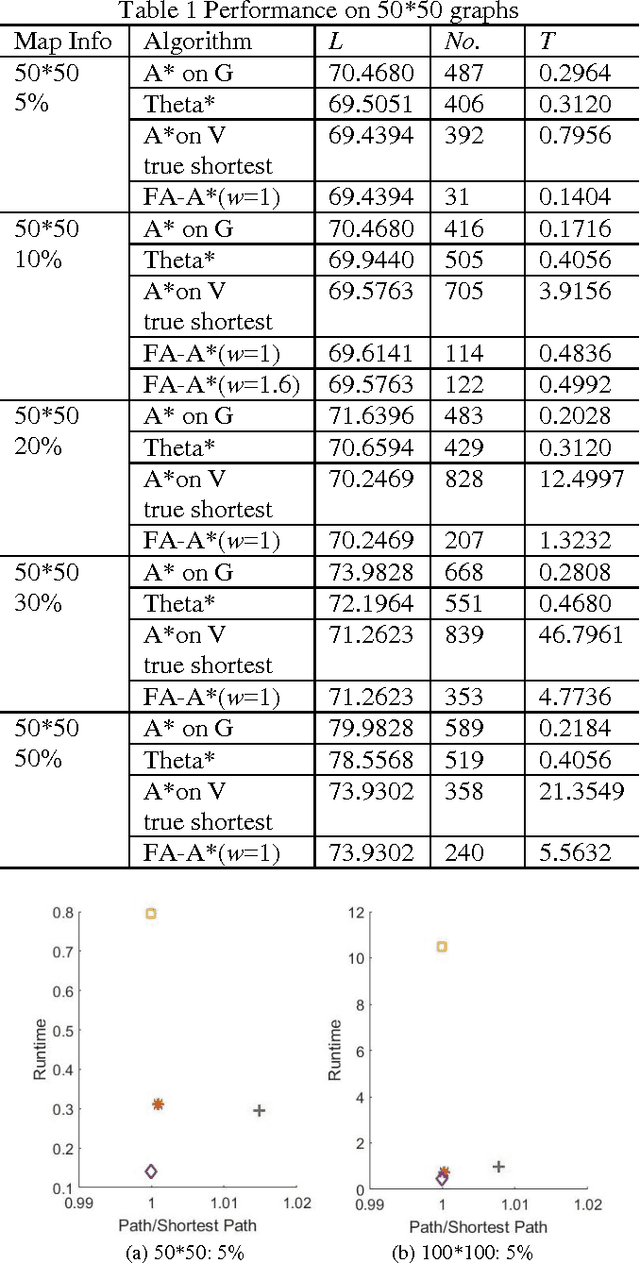
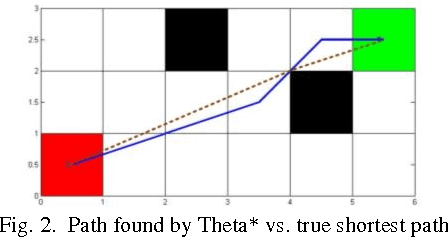
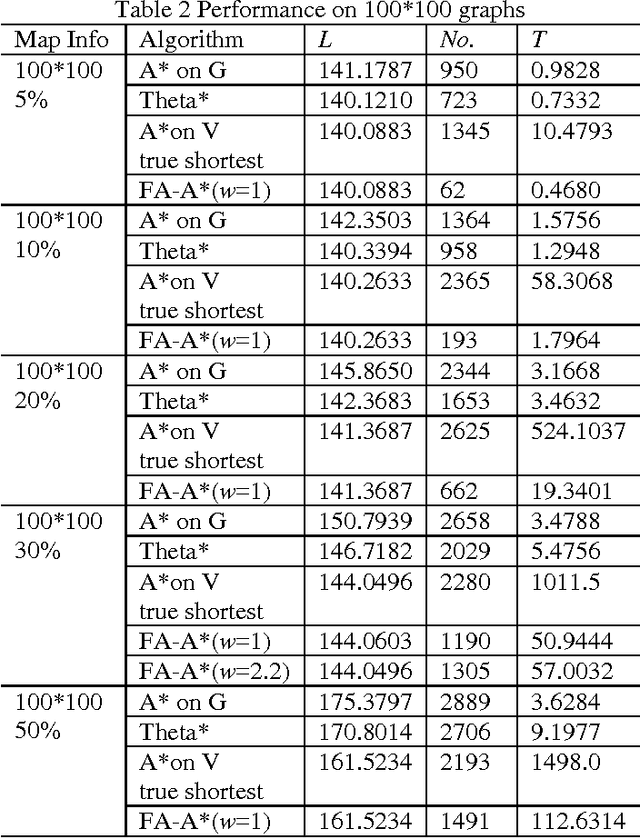
In this research, we investigate the subject of path-finding. A pruned version of visibility graph based on Candidate Vertices is formulated, followed by a new visibility check technique. Such combination enables us to quickly identify the useful vertices and thus find the optimal path more efficiently. The algorithm proposed is demonstrated on various path-finding cases. The performance of the new technique on visibility graphs is compared to the traditional A* on Grids, Theta* and A* on Visibility Graphs in terms of path length, number of nodes evaluated, as well as computational time. The key algorithmic contribution is that the new approach combines the merits of grid-based method and visibility graph-based method and thus yields better overall performance.