 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Intelligent Cooperative Robotics in Additive Manufacturing: Past, Present and Future
Paper and Code
Aug 09, 2024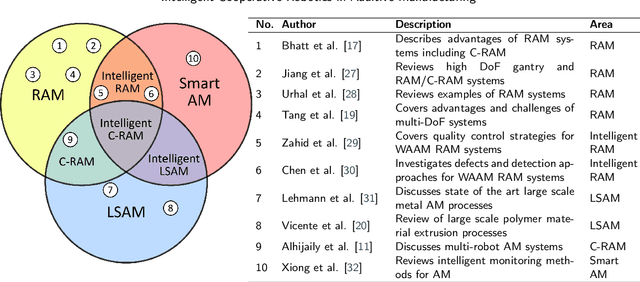
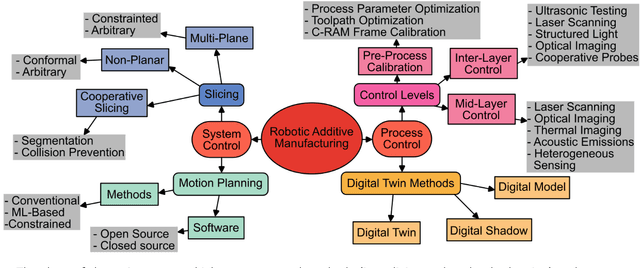
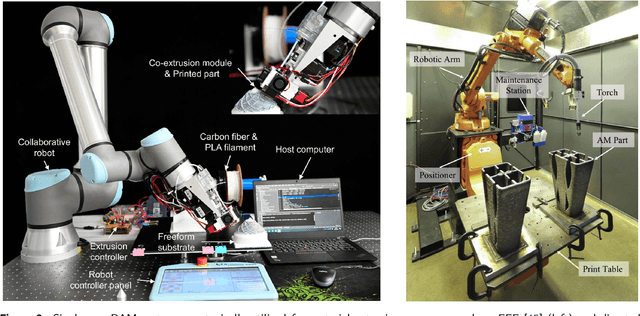
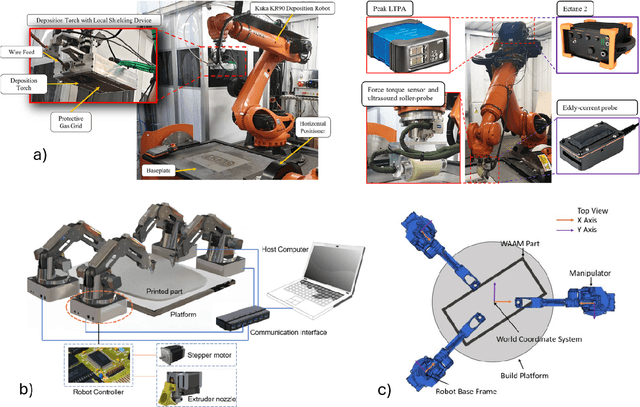
Additive manufacturing (AM) technologies have undergone significant advancements through the integration of cooperative robotics additive manufacturing (C-RAM) platforms. By deploying AM processes on the end effectors of multiple robotic arms, not only are traditional constraints such as limited build volumes circumvented, but systems also achieve accelerated fabrication speeds, cooperative sensing capabilities, and in-situ multi-material deposition. Despite advancements, challenges remain, particularly regarding defect generation including voids, cracks, and residual stress. Various factors contribute to these issues, including toolpath planning (i.e., slicing strategies), part decomposition for cooperative printing, and motion planning (i.e., path and trajectory planning). This review first examines the critical aspects of system control for C-RAM systems comprised of slicing and motion planning. The methods for the mitigation of defects through the adjustment of these aspects and the process parameters of AM methods are then described in the context of how they modify the AM process: pre-process, inter-layer (i.e., during layer pauses), and mid-layer (i.e., during material deposition). The application of advanced sensing technologies, including high-resolution cameras, laser scanners, and thermal imaging, to facilitate the capture of micro, meso, and macro-scale defects is explored. The role of digital twins is analyzed, emphasizing their capability to simulate and predict manufacturing outcomes, enabling preemptive adjustments to prevent defects. Finally, the outlook and future opportunities for developing next-generation C-RAM systems are outlined.