 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Scale Autonomous Driving Scenarios Clustering with Self-supervised Feature Extraction
Mar 30, 2021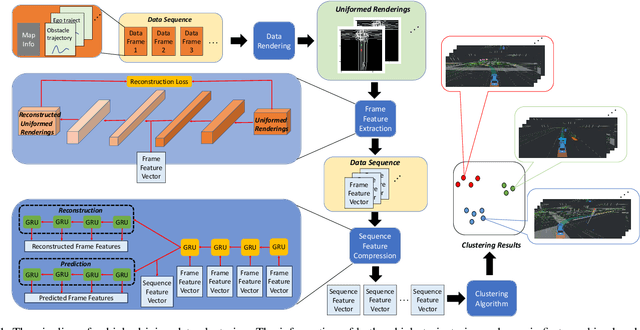
The clustering of autonomous driving scenario data can substantially benefit the autonomous driving validation and simulation systems by improving the simulation tests' completeness and fidelity. This article proposes a comprehensive data clustering framework for a large set of vehicle driving data. Existing algorithms utilize handcrafted features whose quality relies on the judgments of human experts. Additionally, the related feature compression methods are not scalable for a large data-set. Our approach thoroughly considers the traffic elements, including both in-traffic agent objects and map information. Meanwhile, we proposed a self-supervised deep learning approach for spatial and temporal feature extraction to avoid biased data representation. With the newly designed driving data clustering evaluation metrics based on data-augmentation, the accuracy assessment does not require a human-labeled data-set, which is subject to human bias. Via such unprejudiced evaluation metrics, we have shown our approach surpasses the existing methods that rely on handcrafted feature extractions.
Grounding Implicit Goal Description for Robot Indoor Navigation Via Recursive Belief Update
Nov 10, 2020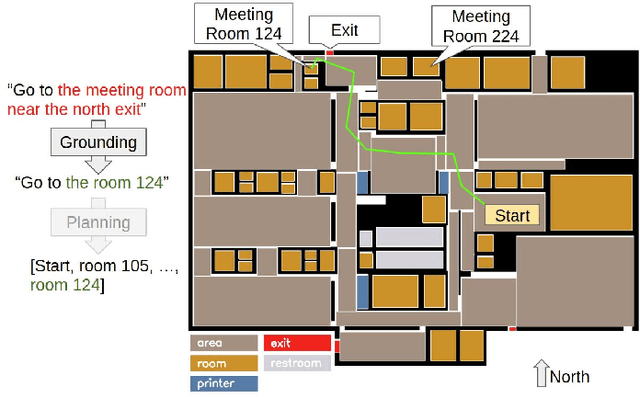
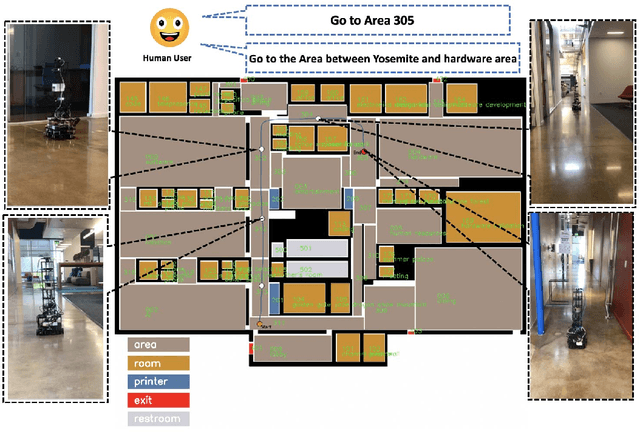
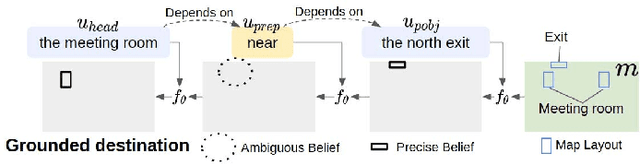
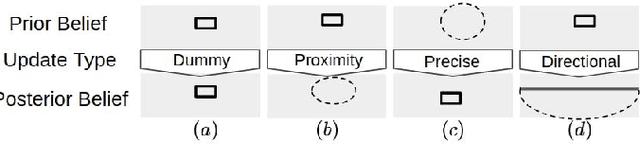
Natural language-based robotic navigation remains a challenging problem due to the human knowledge of navigation constraints, and destination is not directly compatible with the robot knowledge base. In this paper, we aim to translate natural destination commands into high-level robot navigation plans given a map of interest. We identify grammatically associated segments of destination description and recursively apply each of them to update a belief distribution of an area over the given map.We train a destination grounding model using a dataset of single-step belief update for precise, proximity, and directional modifier types. We demonstrate our method on real-world navigation task in an office consisting of 80 areas. Offline experimental results show that our method can directly extract goal destination from unheard, long, and composite text commands asked by humans. This enables users to specify their destination goals for the robot in general and natural form. Hardware experiment results also show that the designed model brings much convenience for specifying a navigation goal to a service robot.
AES: Autonomous Excavator System for Real-World and Hazardous Environments
Nov 10, 2020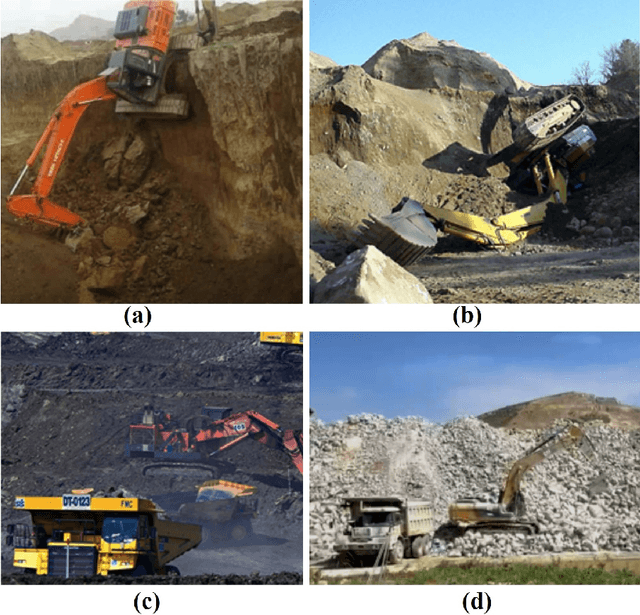
Excavators are widely used for material-handling applications in unstructured environments, including mining and construction. The size of the global market of excavators is 44.12 Billion USD in 2018 and is predicted to grow to 63.14 Billion USD by 2026. Operating excavators in a real-world environment can be challenging due to extreme conditions and rock sliding, ground collapse, or exceeding dust. Multiple fatalities and injuries occur each year during excavations. An autonomous excavator that can substitute human operators in these hazardous environments would substantially lower the number of injuries and can improve the overall productivity.