 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Excavation of Rigid Objects with Offline Reinforcement Learning
Mar 29, 2023



Autonomous excavation is a challenging task. The unknown contact dynamics between the excavator bucket and the terrain could easily result in large contact forces and jamming problems during excavation. Traditional model-based methods struggle to handle such problems due to complex dynamic modeling. In this paper, we formulate the excavation skills with three novel manipulation primitives. We propose to learn the manipulation primitives with offline reinforcement learning (RL) to avoid large amounts of online robot interactions. The proposed method can learn efficient penetration skills from sub-optimal demonstrations, which contain sub-trajectories that can be ``stitched" together to formulate an optimal trajectory without causing jamming. We evaluate the proposed method with extensive experiments on excavating a variety of rigid objects and demonstrate that the learned policy outperforms the demonstrations. We also show that the learned policy can quickly adapt to unseen and challenging fragmented rocks with online fine-tuning.
VINet: Visual and Inertial-based Terrain Classification and Adaptive Navigation over Unknown Terrain
Sep 26, 2022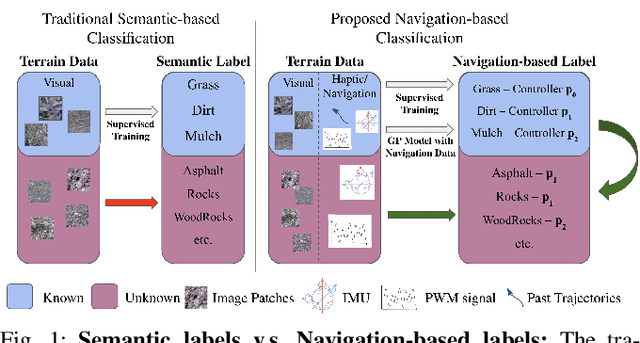
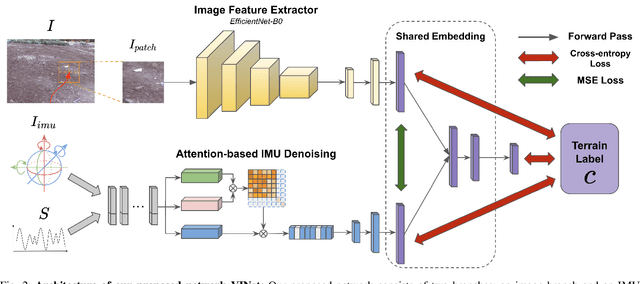
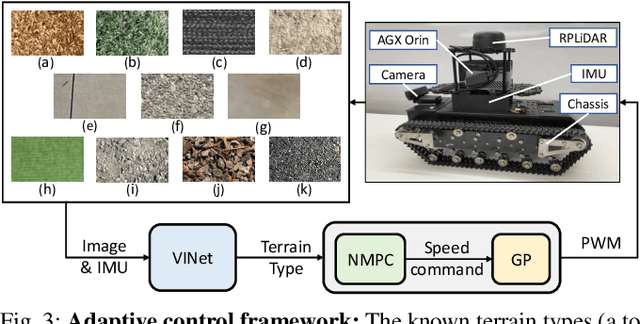
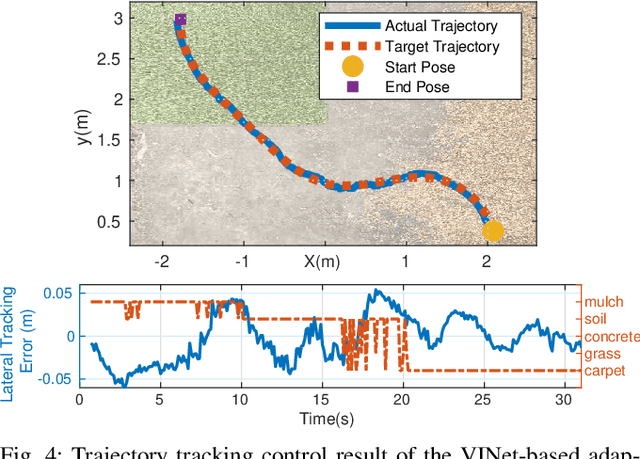
We present a visual and inertial-based terrain classification network (VINet) for robotic navigation over different traversable surfaces. We use a novel navigation-based labeling scheme for terrain classification and generalization on unknown surfaces. Our proposed perception method and adaptive control framework can make predictions according to terrain navigation properties and lead to better performance on both terrain classification and navigation control on known and unknown surfaces. Our VINet can achieve 98.37% in terms of accuracy under supervised setting on known terrains and improve the accuracy by 8.51% on unknown terrains compared to previous methods. We deploy VINet on a mobile tracked robot for trajectory following and navigation on different terrains, and we demonstrate an improvement of 10.3% compared to a baseline controller in terms of RMSE.
Large Scale Autonomous Driving Scenarios Clustering with Self-supervised Feature Extraction
Mar 30, 2021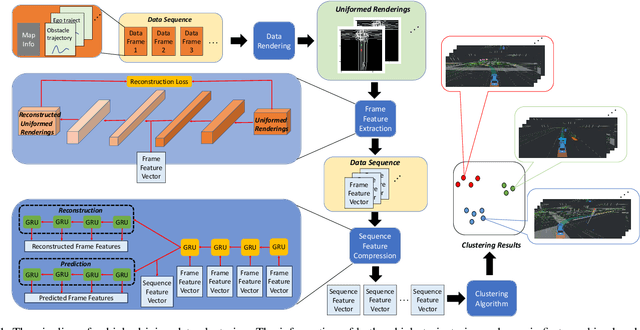
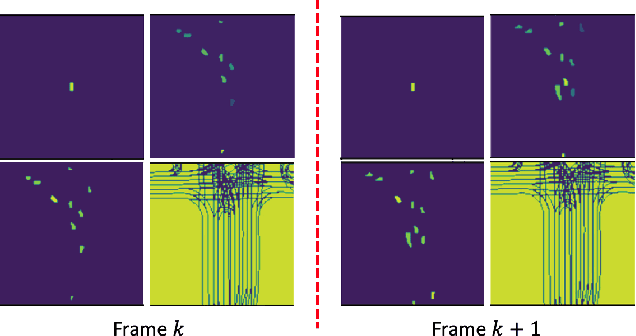
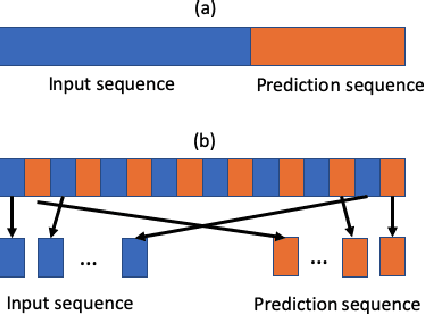
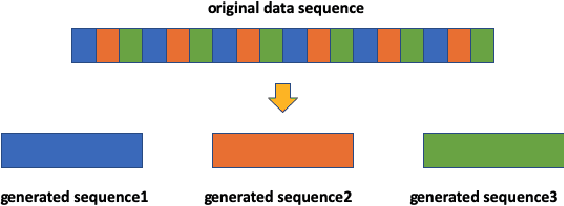
The clustering of autonomous driving scenario data can substantially benefit the autonomous driving validation and simulation systems by improving the simulation tests' completeness and fidelity. This article proposes a comprehensive data clustering framework for a large set of vehicle driving data. Existing algorithms utilize handcrafted features whose quality relies on the judgments of human experts. Additionally, the related feature compression methods are not scalable for a large data-set. Our approach thoroughly considers the traffic elements, including both in-traffic agent objects and map information. Meanwhile, we proposed a self-supervised deep learning approach for spatial and temporal feature extraction to avoid biased data representation. With the newly designed driving data clustering evaluation metrics based on data-augmentation, the accuracy assessment does not require a human-labeled data-set, which is subject to human bias. Via such unprejudiced evaluation metrics, we have shown our approach surpasses the existing methods that rely on handcrafted feature extractions.