 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommercial Vehicle Braking Optimization: A Robust SIFT-Trajectory Approach
Dec 21, 2025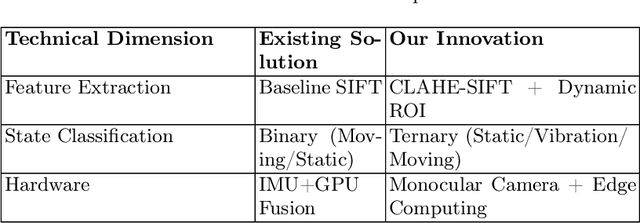
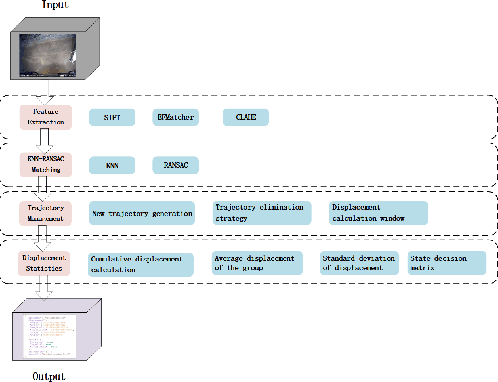
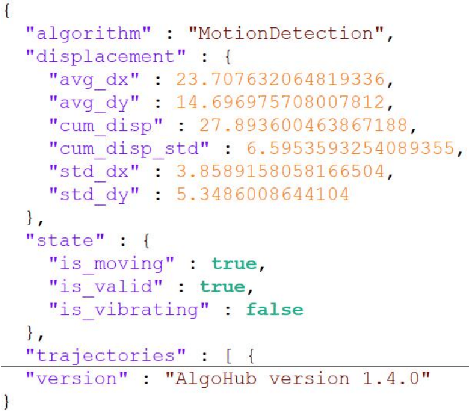
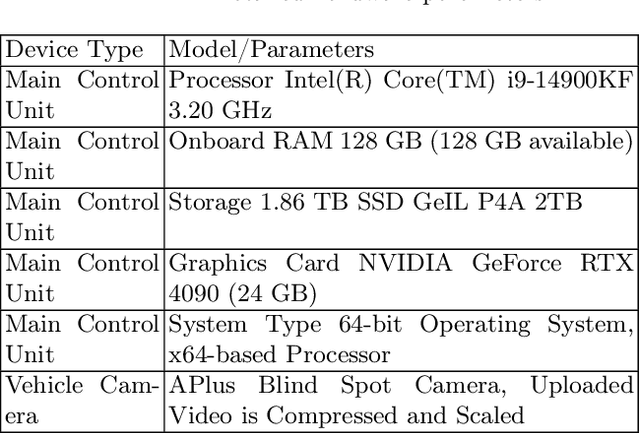
A vision-based trajectory analysis solution is proposed to address the "zero-speed braking" issue caused by inaccurate Controller Area Network (CAN) signals in commercial vehicle Automatic Emergency Braking (AEB) systems during low-speed operation. The algorithm utilizes the NVIDIA Jetson AGX Xavier platform to process sequential video frames from a blind spot camera, employing self-adaptive Contrast Limited Adaptive Histogram Equalization (CLAHE)-enhanced Scale-Invariant Feature Transform (SIFT) feature extraction and K-Nearest Neighbors (KNN)-Random Sample Consensus (RANSAC) matching. This allows for precise classification of the vehicle's motion state (static, vibration, moving). Key innovations include 1) multiframe trajectory displacement statistics (5-frame sliding window), 2) a dual-threshold state decision matrix, and 3) OBD-II driven dynamic Region of Interest (ROI) configuration. The system effectively suppresses environmental interference and false detection of dynamic objects, directly addressing the challenge of low-speed false activation in commercial vehicle safety systems. Evaluation in a real-world dataset (32,454 video segments from 1,852 vehicles) demonstrates an F1-score of 99.96% for static detection, 97.78% for moving state recognition, and a processing delay of 14.2 milliseconds (resolution 704x576). The deployment on-site shows an 89% reduction in false braking events, a 100% success rate in emergency braking, and a fault rate below 5%.
CHOICE: Coordinated Human-Object Interaction in Cluttered Environments for Pick-and-Place Actions
Dec 09, 2024
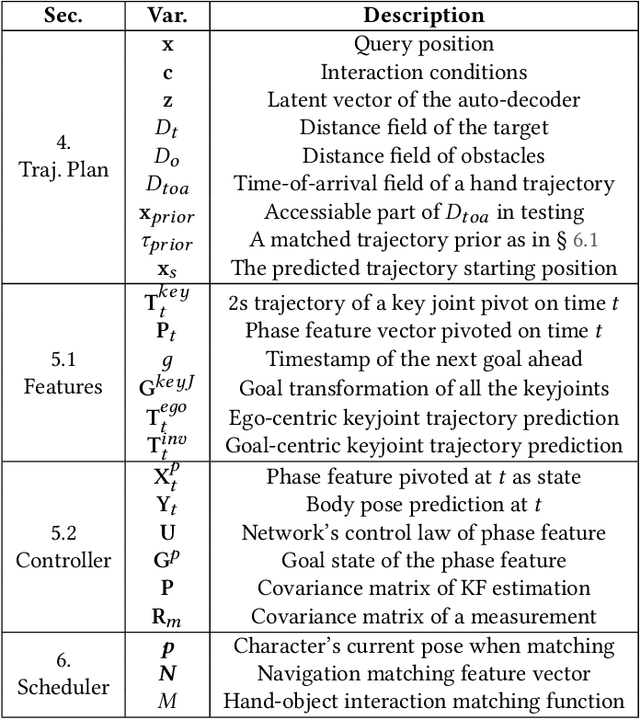
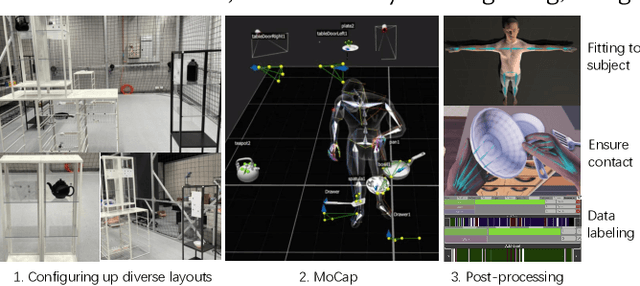
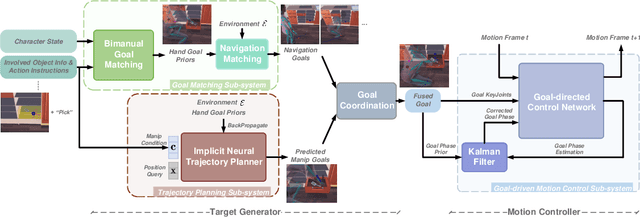
Animating human-scene interactions such as pick-and-place tasks in cluttered, complex layouts is a challenging task, with objects of a wide variation of geometries and articulation under scenarios with various obstacles. The main difficulty lies in the sparsity of the motion data compared to the wide variation of the objects and environments as well as the poor availability of transition motions between different tasks, increasing the complexity of the generalization to arbitrary conditions. To cope with this issue, we develop a system that tackles the interaction synthesis problem as a hierarchical goal-driven task. Firstly, we develop a bimanual scheduler that plans a set of keyframes for simultaneously controlling the two hands to efficiently achieve the pick-and-place task from an abstract goal signal such as the target object selected by the user. Next, we develop a neural implicit planner that generates guidance hand trajectories under diverse object shape/types and obstacle layouts. Finally, we propose a linear dynamic model for our DeepPhase controller that incorporates a Kalman filter to enable smooth transitions in the frequency domain, resulting in a more realistic and effective multi-objective control of the character.Our system can produce a wide range of natural pick-and-place movements with respect to the geometry of objects, the articulation of containers and the layout of the objects in the scene.
Auto robust relative radiometric normalization via latent change noise modelling
Nov 24, 2021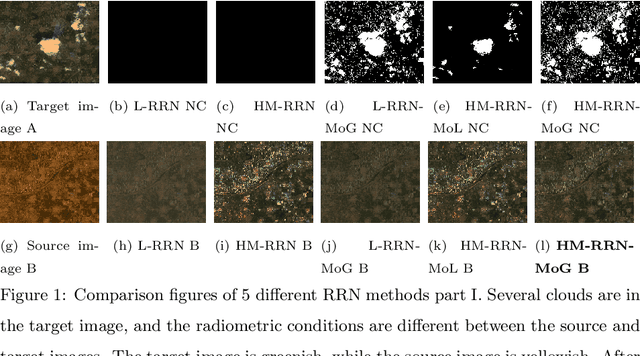
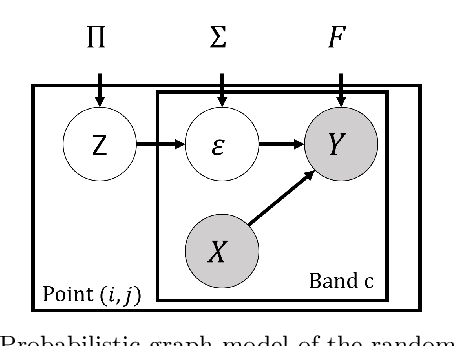
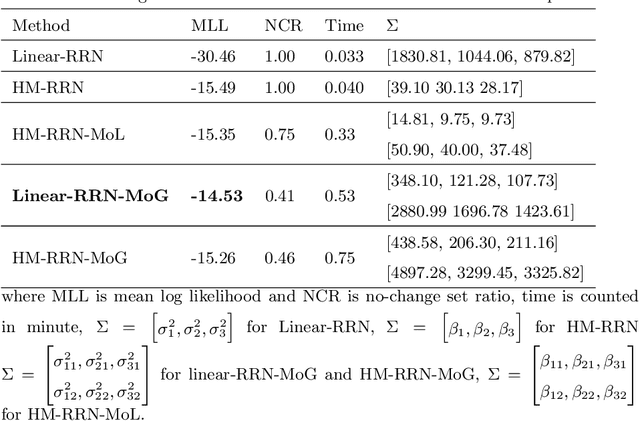
Relative radiometric normalization(RRN) of different satellite images of the same terrain is necessary for change detection, object classification/segmentation, and map-making tasks. However, traditional RRN models are not robust, disturbing by object change, and RRN models precisely considering object change can not robustly obtain the no-change set. This paper proposes auto robust relative radiometric normalization methods via latent change noise modeling. They utilize the prior knowledge that no change points possess small-scale noise under relative radiometric normalization and that change points possess large-scale radiometric noise after radiometric normalization, combining the stochastic expectation maximization method to quickly and robustly extract the no-change set to learn the relative radiometric normalization mapping functions. This makes our model theoretically grounded regarding the probabilistic theory and mathematics deduction. Specifically, when we select histogram matching as the relative radiometric normalization learning scheme integrating with the mixture of Gaussian noise(HM-RRN-MoG), the HM-RRN-MoG model achieves the best performance. Our model possesses the ability to robustly against clouds/fogs/changes. Our method naturally generates a robust evaluation indicator for RRN that is the no-change set root mean square error. We apply the HM-RRN-MoG model to the latter vegetation/water change detection task, which reduces the radiometric contrast and NDVI/NDWI differences on the no-change set, generates consistent and comparable results. We utilize the no-change set into the building change detection task, efficiently reducing the pseudo-change and boosting the precision.