 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent Enhanced High-Quality Image Recovery
Jul 16, 2020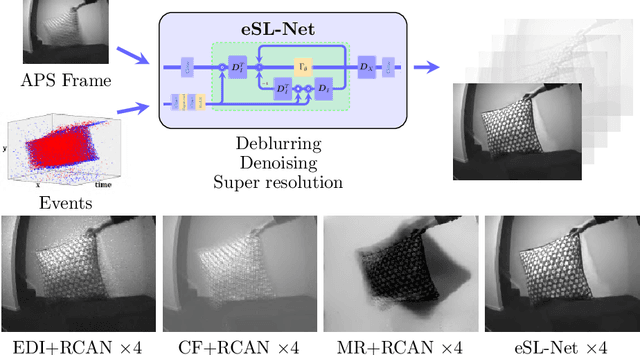

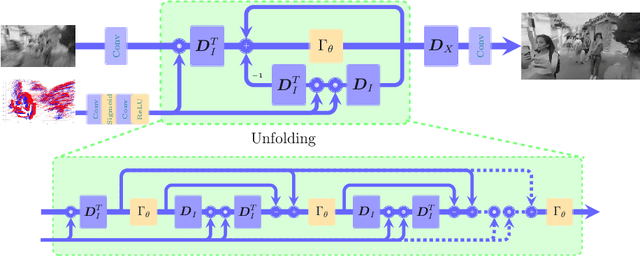

With extremely high temporal resolution, event cameras have a large potential for robotics and computer vision. However, their asynchronous imaging mechanism often aggravates the measurement sensitivity to noises and brings a physical burden to increase the image spatial resolution. To recover high-quality intensity images, one should address both denoising and super-resolution problems for event cameras. Since events depict brightness changes, with the enhanced degeneration model by the events, the clear and sharp high-resolution latent images can be recovered from the noisy, blurry and low-resolution intensity observations. Exploiting the framework of sparse learning, the events and the low-resolution intensity observations can be jointly considered. Based on this, we propose an explainable network, an event-enhanced sparse learning network (eSL-Net), to recover the high-quality images from event cameras. After training with a synthetic dataset, the proposed eSL-Net can largely improve the performance of the state-of-the-art by 7-12 dB. Furthermore, without additional training process, the proposed eSL-Net can be easily extended to generate continuous frames with frame-rate as high as the events.
Cooperative driving strategy based on naturalitic driving data and non-cooperative MPC
Oct 10, 2019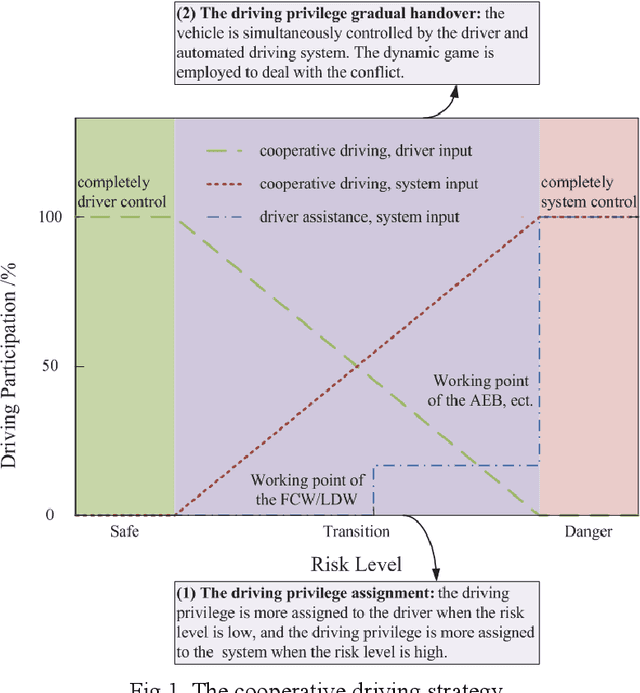
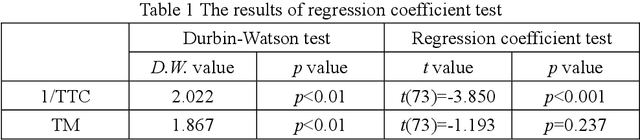

A cooperative driving strategy is proposed, in which the dynamic driving privilege assignment in real-time and the driving privilege gradual handover are realized. The first issue in cooperative driving is the driving privilege assignment based on the risk level. The risk assessment methods in 2 typical dangerous scenarios are presented, i.e. the car-following scenario and the cut-in scenario. The naturalistic driving data is used to study the behavior characteristics of the driver. TTC (time to collosion) is defined as an obvious risk measure, whereas the time before the host vehicle has to brake assuming that the target vehicle is braking is defined as the potential risk measure, i.e. the time margin (TM). A risk assessment algorithm is proposed based on the obvious risk and potential risk. The naturalistic driving data are applied to verify the effectiveness of the risk assessment algorithm. It is identified that the risk assessment algorithm performs better than TTC in the ROC (receiver operating characteristic). The second issue in cooperative driving is the driving privilege gradual handover. The vehicle is jointly controlled by the driver and automated driving system during the driving privilege gradual handover. The non-cooperative MPC (model predictive control) is employed to resolve the conflicts between the driver and automated driving system. It is identified that the Nash equilibrium of the non-cooperative MPC can be achieved by using a non-iterative method. The driving privilege gradual handover is realized by using the confidence matrixes update. The simulation verification shows that the the cooperative driving strategy can realize the gradual handover of the driving privilege between the driver and automated system, and the cooperative driving strategy can dynamically assige the driving privilege in real-time according to the risk level.