 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning of Volume-guided Progressive View Inpainting for 3D Point Scene Completion from a Single Depth Image
Mar 12, 2019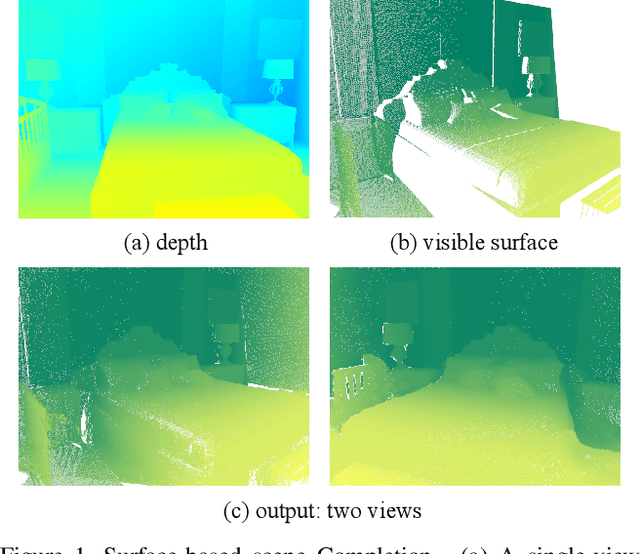

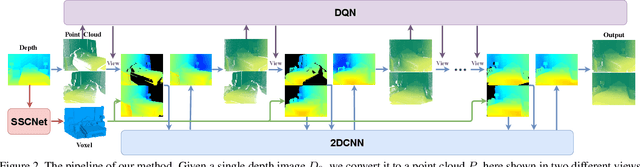
We present a deep reinforcement learning method of progressive view inpainting for 3D point scene completion under volume guidance, achieving high-quality scene reconstruction from only a single depth image with severe occlusion. Our approach is end-to-end, consisting of three modules: 3D scene volume reconstruction, 2D depth map inpainting, and multi-view selection for completion. Given a single depth image, our method first goes through the 3D volume branch to obtain a volumetric scene reconstruction as a guide to the next view inpainting step, which attempts to make up the missing information; the third step involves projecting the volume under the same view of the input, concatenating them to complete the current view depth, and integrating all depth into the point cloud. Since the occluded areas are unavailable, we resort to a deep Q-Network to glance around and pick the next best view for large hole completion progressively until a scene is adequately reconstructed while guaranteeing validity. All steps are learned jointly to achieve robust and consistent results. We perform qualitative and quantitative evaluations with extensive experiments on the SUNCG data, obtaining better results than the state of the art.