 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussHDR: High Dynamic Range Gaussian Splatting via Learning Unified 3D and 2D Local Tone Mapping
Mar 13, 2025



High dynamic range (HDR) novel view synthesis (NVS) aims to reconstruct HDR scenes by leveraging multi-view low dynamic range (LDR) images captured at different exposure levels. Current training paradigms with 3D tone mapping often result in unstable HDR reconstruction, while training with 2D tone mapping reduces the model's capacity to fit LDR images. Additionally, the global tone mapper used in existing methods can impede the learning of both HDR and LDR representations. To address these challenges, we present GaussHDR, which unifies 3D and 2D local tone mapping through 3D Gaussian splatting. Specifically, we design a residual local tone mapper for both 3D and 2D tone mapping that accepts an additional context feature as input. We then propose combining the dual LDR rendering results from both 3D and 2D local tone mapping at the loss level. Finally, recognizing that different scenes may exhibit varying balances between the dual results, we introduce uncertainty learning and use the uncertainties for adaptive modulation. Extensive experiments demonstrate that GaussHDR significantly outperforms state-of-the-art methods in both synthetic and real-world scenarios.
Smart energy management: process structure-based hybrid neural networks for optimal scheduling and economic predictive control in integrated systems
Oct 07, 2024Integrated energy systems (IESs) are complex systems consisting of diverse operating units spanning multiple domains. To address its operational challenges, we propose a physics-informed hybrid time-series neural network (NN) surrogate to predict the dynamic performance of IESs across multiple time scales. This neural network-based modeling approach develops time-series multi-layer perceptrons (MLPs) for the operating units and integrates them with prior process knowledge about system structure and fundamental dynamics. This integration forms three hybrid NNs (long-term, slow, and fast MLPs) that predict the entire system dynamics across multiple time scales. Leveraging these MLPs, we design an NN-based scheduler and an NN-based economic model predictive control (NEMPC) framework to meet global operational requirements: rapid electrical power responsiveness to operators requests, adequate cooling supply to customers, and increased system profitability, while addressing the dynamic time-scale multiplicity present in IESs. The proposed day-ahead scheduler is formulated using the ReLU network-based MLP, which effectively represents IES performance under a broad range of conditions from a long-term perspective. The scheduler is then exactly recast into a mixed-integer linear programming problem for efficient evaluation. The real-time NEMPC, based on slow and fast MLPs, comprises two sequential distributed control agents: a slow NEMPC for the cooling-dominant subsystem with slower transient responses and a fast NEMPC for the power-dominant subsystem with faster responses. Extensive simulations demonstrate that the developed scheduler and NEMPC schemes outperform their respective benchmark scheduler and controller by about 25% and 40%. Together, they enhance overall system performance by over 70% compared to benchmark approaches.
A semi-centralized multi-agent RL framework for efficient irrigation scheduling
Aug 15, 2024This paper proposes a Semi-Centralized Multi-Agent Reinforcement Learning (SCMARL) approach for irrigation scheduling in spatially variable agricultural fields, where management zones address spatial variability. The SCMARL framework is hierarchical in nature, with a centralized coordinator agent at the top level and decentralized local agents at the second level. The coordinator agent makes daily binary irrigation decisions based on field-wide conditions, which are communicated to the local agents. Local agents determine appropriate irrigation amounts for specific management zones using local conditions. The framework employs state augmentation approach to handle non-stationarity in the local agents' environments. An extensive evaluation on a large-scale field in Lethbridge, Canada, compares the SCMARL approach with a learning-based multi-agent model predictive control scheduling approach, highlighting its enhanced performance, resulting in water conservation and improved Irrigation Water Use Efficiency (IWUE). Notably, the proposed approach achieved a 4.0% savings in irrigation water while enhancing the IWUE by 6.3%.
Mono-ViFI: A Unified Learning Framework for Self-supervised Single- and Multi-frame Monocular Depth Estimation
Jul 19, 2024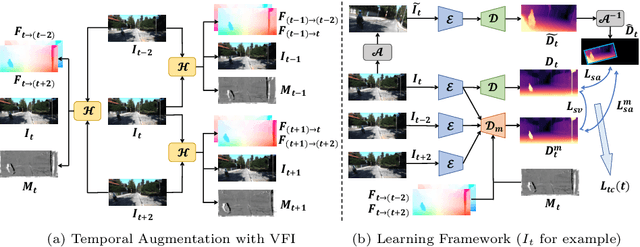
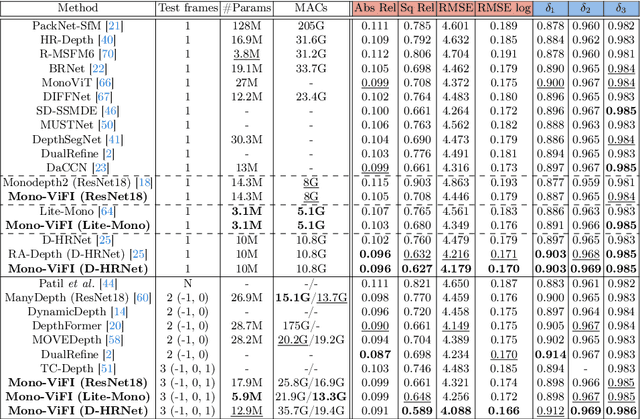
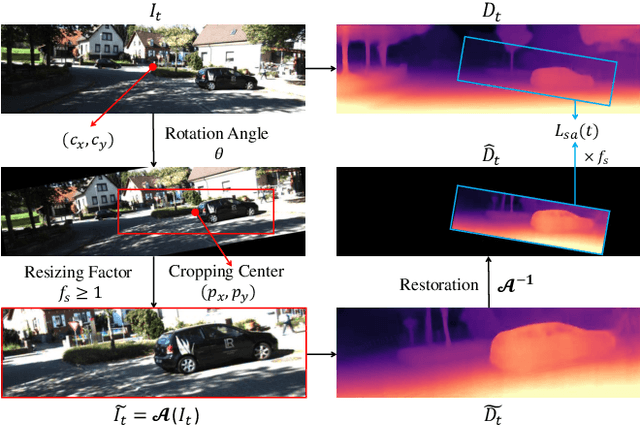
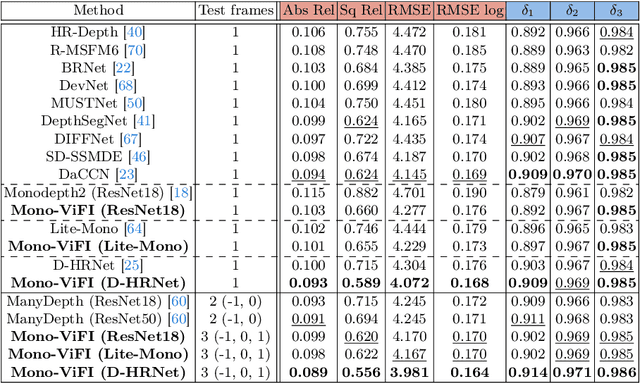
Self-supervised monocular depth estimation has gathered notable interest since it can liberate training from dependency on depth annotations. In monocular video training case, recent methods only conduct view synthesis between existing camera views, leading to insufficient guidance. To tackle this, we try to synthesize more virtual camera views by flow-based video frame interpolation (VFI), termed as temporal augmentation. For multi-frame inference, to sidestep the problem of dynamic objects encountered by explicit geometry-based methods like ManyDepth, we return to the feature fusion paradigm and design a VFI-assisted multi-frame fusion module to align and aggregate multi-frame features, using motion and occlusion information obtained by the flow-based VFI model. Finally, we construct a unified self-supervised learning framework, named Mono-ViFI, to bilaterally connect single- and multi-frame depth. In this framework, spatial data augmentation through image affine transformation is incorporated for data diversity, along with a triplet depth consistency loss for regularization. The single- and multi-frame models can share weights, making our framework compact and memory-efficient. Extensive experiments demonstrate that our method can bring significant improvements to current advanced architectures. Source code is available at https://github.com/LiuJF1226/Mono-ViFI.
Determination of Trace Organic Contaminant Concentration via Machine Classification of Surface-Enhanced Raman Spectra
Jan 31, 2024Accurate detection and analysis of traces of persistent organic pollutants in water is important in many areas, including environmental monitoring and food quality control, due to their long environmental stability and potential bioaccumulation. While conventional analysis of organic pollutants requires expensive equipment, surface enhanced Raman spectroscopy (SERS) has demonstrated great potential for accurate detection of these contaminants. However, SERS analytical difficulties, such as spectral preprocessing, denoising, and substrate-based spectral variation, have hindered widespread use of the technique. Here, we demonstrate an approach for predicting the concentration of sample pollutants from messy, unprocessed Raman data using machine learning. Frequency domain transform methods, including the Fourier and Walsh Hadamard transforms, are applied to sets of Raman spectra of three model micropollutants in water (rhodamine 6G, chlorpyrifos, and triclosan), which are then used to train machine learning algorithms. Using standard machine learning models, the concentration of sample pollutants are predicted with more than 80 percent cross-validation accuracy from raw Raman data. cross-validation accuracy of 85 percent was achieved using deep learning for a moderately sized dataset (100 spectra), and 70 to 80 percent cross-validation accuracy was achieved even for very small datasets (50 spectra). Additionally, standard models were shown to accurately identify characteristic peaks via analysis of their importance scores. The approach shown here has the potential to be applied to facilitate accurate detection and analysis of persistent organic pollutants by surface-enhanced Raman spectroscopy.
Towards Better Data Exploitation In Self-Supervised Monocular Depth Estimation
Sep 11, 2023



Depth estimation plays an important role in the robotic perception system. Self-supervised monocular paradigm has gained significant attention since it can free training from the reliance on depth annotations. Despite recent advancements, existing self-supervised methods still underutilize the available training data, limiting their generalization ability. In this paper, we take two data augmentation techniques, namely Resizing-Cropping and Splitting-Permuting, to fully exploit the potential of training datasets. Specifically, the original image and the generated two augmented images are fed into the training pipeline simultaneously and we leverage them to conduct self-distillation. Additionally, we introduce the detail-enhanced DepthNet with an extra full-scale branch in the encoder and a grid decoder to enhance the restoration of fine details in depth maps. Experimental results demonstrate our method can achieve state-of-the-art performance on the KITTI benchmark, with both raw ground truth and improved ground truth. Moreover, our models also show superior generalization performance when transferring to Make3D and NYUv2 datasets. Our codes are available at https://github.com/Sauf4896/BDEdepth.
Optimizing the switching operation in monoclonal antibody production: Economic MPC and reinforcement learning
Aug 07, 2023



Monoclonal antibodies (mAbs) have emerged as indispensable assets in medicine, and are currently at the forefront of biopharmaceutical product development. However, the growing market demand and the substantial doses required for mAb clinical treatments necessitate significant progress in its large-scale production. Most of the processes for industrial mAb production rely on batch operations, which result in significant downtime. The shift towards a fully continuous and integrated manufacturing process holds the potential to boost product yield and quality, while eliminating the extra expenses associated with storing intermediate products. The integrated continuous mAb production process can be divided into the upstream and downstream processes. One crucial aspect that ensures the continuity of the integrated process is the switching of the capture columns, which are typically chromatography columns operated in a fed-batch manner downstream. Due to the discrete nature of the switching operation, advanced process control algorithms such as economic MPC (EMPC) are computationally difficult to implement. This is because an integer nonlinear program (INLP) needs to be solved online at each sampling time. This paper introduces two computationally-efficient approaches for EMPC implementation, namely, a sigmoid function approximation approach and a rectified linear unit (ReLU) approximation approach. It also explores the application of deep reinforcement learning (DRL). These three methods are compared to the traditional switching approach which is based on a 1% product breakthrough rule and which involves no optimization.
Integrating machine learning paradigms and mixed-integer model predictive control for irrigation scheduling
Jun 14, 2023



The agricultural sector currently faces significant challenges in water resource conservation and crop yield optimization, primarily due to concerns over freshwater scarcity. Traditional irrigation scheduling methods often prove inadequate in meeting the needs of large-scale irrigation systems. To address this issue, this paper proposes a predictive irrigation scheduler that leverages the three paradigms of machine learning to optimize irrigation schedules. The proposed scheduler employs the k-means clustering approach to divide the field into distinct irrigation management zones based on soil hydraulic parameters and topology information. Furthermore, a long short-term memory network is employed to develop dynamic models for each management zone, enabling accurate predictions of soil moisture dynamics. Formulated as a mixed-integer model predictive control problem, the scheduler aims to maximize water uptake while minimizing overall water consumption and irrigation costs. To tackle the mixed-integer optimization challenge, the proximal policy optimization algorithm is utilized to train a reinforcement learning agent responsible for making daily irrigation decisions. To evaluate the performance of the proposed scheduler, a 26.4-hectare field in Lethbridge, Canada, was chosen as a case study for the 2015 and 2022 growing seasons. The results demonstrate the superiority of the proposed scheduler compared to a traditional irrigation scheduling method in terms of water use efficiency and crop yield improvement for both growing seasons. Notably, the proposed scheduler achieved water savings ranging from 6.4% to 22.8%, along with yield increases ranging from 2.3% to 4.3%.
Control invariant set enhanced safe reinforcement learning: improved sampling efficiency, guaranteed stability and robustness
May 24, 2023



Reinforcement learning (RL) is an area of significant research interest, and safe RL in particular is attracting attention due to its ability to handle safety-driven constraints that are crucial for real-world applications. This work proposes a novel approach to RL training, called control invariant set (CIS) enhanced RL, which leverages the advantages of utilizing the explicit form of CIS to improve stability guarantees and sampling efficiency. Furthermore, the robustness of the proposed approach is investigated in the presence of uncertainty. The approach consists of two learning stages: offline and online. In the offline stage, CIS is incorporated into the reward design, initial state sampling, and state reset procedures. This incorporation of CIS facilitates improved sampling efficiency during the offline training process. In the online stage, RL is retrained whenever the predicted next step state is outside of the CIS, which serves as a stability criterion, by introducing a Safety Supervisor to examine the safety of the action and make necessary corrections. The stability analysis is conducted for both cases, with and without uncertainty. To evaluate the proposed approach, we apply it to a simulated chemical reactor. The results show a significant improvement in sampling efficiency during offline training and closed-loop stability guarantee in the online implementation, with and without uncertainty.
Control invariant set enhanced reinforcement learning for process control: improved sampling efficiency and guaranteed stability
Apr 11, 2023



Reinforcement learning (RL) is an area of significant research interest, and safe RL in particular is attracting attention due to its ability to handle safety-driven constraints that are crucial for real-world applications of RL algorithms. This work proposes a novel approach to RL training, called control invariant set (CIS) enhanced RL, which leverages the benefits of CIS to improve stability guarantees and sampling efficiency. The approach consists of two learning stages: offline and online. In the offline stage, CIS is incorporated into the reward design, initial state sampling, and state reset procedures. In the online stage, RL is retrained whenever the state is outside of CIS, which serves as a stability criterion. A backup table that utilizes the explicit form of CIS is obtained to ensure the online stability. To evaluate the proposed approach, we apply it to a simulated chemical reactor. The results show a significant improvement in sampling efficiency during offline training and closed-loop stability in the online implementation.