 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeX-Coder: Advancing Competitive Programming with Fully Synthetic Tasks, Solutions, and Tests
Jan 11, 2026Competitive programming presents great challenges for Code LLMs due to its intensive reasoning demands and high logical complexity. However, current Code LLMs still rely heavily on real-world data, which limits their scalability. In this paper, we explore a fully synthetic approach: training Code LLMs with entirely generated tasks, solutions, and test cases, to empower code reasoning models without relying on real-world data. To support this, we leverage feature-based synthesis to propose a novel data synthesis pipeline called SynthSmith. SynthSmith shows strong potential in producing diverse and challenging tasks, along with verified solutions and tests, supporting both supervised fine-tuning and reinforcement learning. Based on the proposed synthetic SFT and RL datasets, we introduce the X-Coder model series, which achieves a notable pass rate of 62.9 avg@8 on LiveCodeBench v5 and 55.8 on v6, outperforming DeepCoder-14B-Preview and AReal-boba2-14B despite having only 7B parameters. In-depth analysis reveals that scaling laws hold on our synthetic dataset, and we explore which dimensions are more effective to scale. We further provide insights into code-centric reinforcement learning and highlight the key factors that shape performance through detailed ablations and analysis. Our findings demonstrate that scaling high-quality synthetic data and adopting staged training can greatly advance code reasoning, while mitigating reliance on real-world coding data.
DHI: Leveraging Diverse Hallucination Induction for Enhanced Contrastive Factuality Control in Large Language Models
Jan 03, 2026Large language models (LLMs) frequently produce inaccurate or fabricated information, known as "hallucinations," which compromises their reliability. Existing approaches often train an "Evil LLM" to deliberately generate hallucinations on curated datasets, using these induced hallucinations to guide contrastive decoding against a reliable "positive model" for hallucination mitigation. However, this strategy is limited by the narrow diversity of hallucinations induced, as Evil LLMs trained on specific error types tend to reproduce only these particular patterns, thereby restricting their overall effectiveness. To address these limitations, we propose DHI (Diverse Hallucination Induction), a novel training framework that enables the Evil LLM to generate a broader range of hallucination types without relying on pre-annotated hallucination data. DHI employs a modified loss function that down-weights the generation of specific factually correct tokens, encouraging the Evil LLM to produce diverse hallucinations at targeted positions while maintaining overall factual content. Additionally, we introduce a causal attention masking adaptation to reduce the impact of this penalization on the generation of subsequent tokens. During inference, we apply an adaptive rationality constraint that restricts contrastive decoding to tokens where the positive model exhibits high confidence, thereby avoiding unnecessary penalties on factually correct tokens. Extensive empirical results show that DHI achieves significant performance gains over other contrastive decoding-based approaches across multiple hallucination benchmarks.
SongSage: A Large Musical Language Model with Lyric Generative Pre-training
Jan 03, 2026Large language models have achieved significant success in various domains, yet their understanding of lyric-centric knowledge has not been fully explored. In this work, we first introduce PlaylistSense, a dataset to evaluate the playlist understanding capability of language models. PlaylistSense encompasses ten types of user queries derived from common real-world perspectives, challenging LLMs to accurately grasp playlist features and address diverse user intents. Comprehensive evaluations indicate that current general-purpose LLMs still have potential for improvement in playlist understanding. Inspired by this, we introduce SongSage, a large musical language model equipped with diverse lyric-centric intelligence through lyric generative pretraining. SongSage undergoes continual pretraining on LyricBank, a carefully curated corpus of 5.48 billion tokens focused on lyrical content, followed by fine-tuning with LyricBank-SFT, a meticulously crafted instruction set comprising 775k samples across nine core lyric-centric tasks. Experimental results demonstrate that SongSage exhibits a strong understanding of lyric-centric knowledge, excels in rewriting user queries for zero-shot playlist recommendations, generates and continues lyrics effectively, and performs proficiently across seven additional capabilities. Beyond its lyric-centric expertise, SongSage also retains general knowledge comprehension and achieves a competitive MMLU score. We will keep the datasets inaccessible due to copyright restrictions and release the SongSage and training script to ensure reproducibility and support music AI research and applications, the datasets release plan details are provided in the appendix.
Bridging Hard and Soft: Mechanical Metamaterials Enable Rigid Torque Transmission in Soft Robots
Dec 03, 2024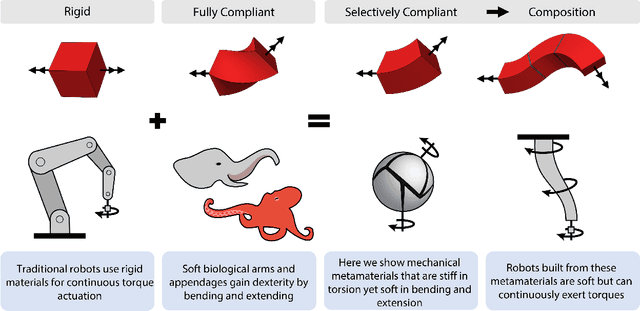
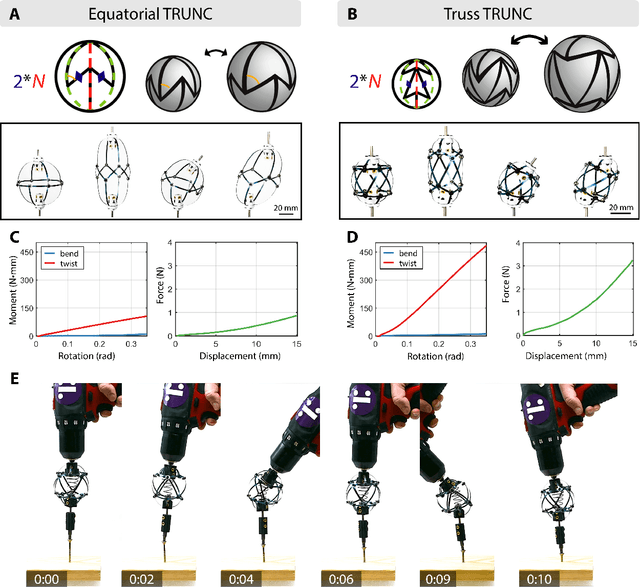

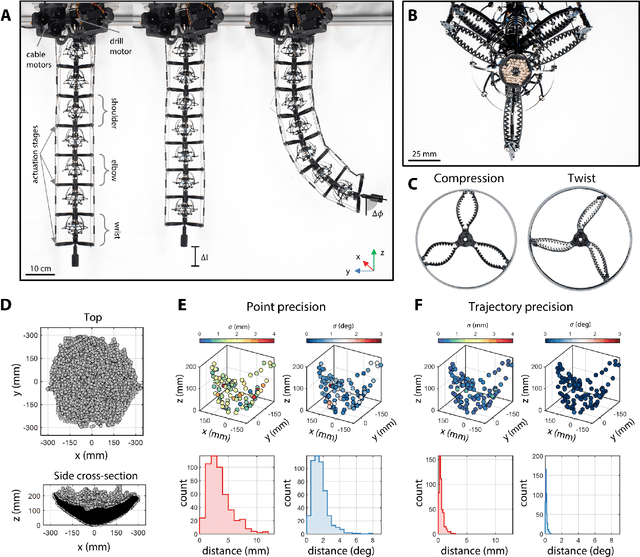
Torque and continuous rotation are fundamental methods of actuation and manipulation in rigid robots. Soft robot arms use soft materials and structures to mimic the passive compliance of biological arms that bend and extend. This use of compliance prevents soft arms from continuously transmitting and exerting torques to interact with their environment. Here, we show how relying on patterning structures instead of inherent material properties allows soft robotic arms to remain compliant while continuously transmitting torque to their environment. We demonstrate a soft robotic arm made from a pair of mechanical metamaterials that act as compliant constant-velocity joints. The joints are up to 52 times stiffer in torsion than bending and can bend up to 45{\deg}. This robot arm can continuously transmit torque while deforming in all other directions. The arm's mechanical design achieves high motion repeatability (0.4 mm and 0.1{\deg}) when tracking trajectories. We then trained a neural network to learn the inverse kinematics, enabling us to program the arm to complete tasks that are challenging for existing soft robots such as installing light bulbs, fastening bolts, and turning valves. The arm's passive compliance makes it safe around humans and provides a source of mechanical intelligence, enabling it to adapt to misalignment when manipulating objects. This work will bridge the gap between hard and soft robotics with applications in human assistance, warehouse automation, and extreme environments.